Moon Monday #161: Savoring SLIM’s success in precision landing, India’s role in it, and more mission updates
After ruminating over SLIM’s Moon landing and the news of it achieving its goal of a precision landing, it’s clear that there are many more implications and aspects of the mission to consider so as to savor its selene success. Enjoy the SLIM special Moon Monday!
SLIM is alive, and its landing is remarkable in more ways than one

On January 25, JAXA provided a detailed rundown of how the lunar landing of its SLIM spacecraft went on January 19. During its final phase of the descent when SLIM was roughly 50 meters above the lunar surface, it hovered for a second time and successfully identified touchdown hazards below it to start lowering itself accordingly. But at this point, one of the two main engine nozzles on the lander mysteriously broke off and fell (image). This reduced the lander’s thrust level to 55%, and made it go sideways. Since then, the latter issue had to be continually kept in control by SLIM’s guidance system using the other main engine and smaller thrusters.
{kind=link}
SLIM touched down on the Moon at 13.316°S, 25.251°E, lying within the rocky ejecta of the 300-meter wide Shioli crater. While its vertical velocity of 1.4 meters/second on touchdown was well within the designed upper bound, the eastward lateral motion and touchdown orientation weren’t nominal, causing SLIM to flip on the surface with its solar panels facing away from the Sun.

SLIM explores Selene
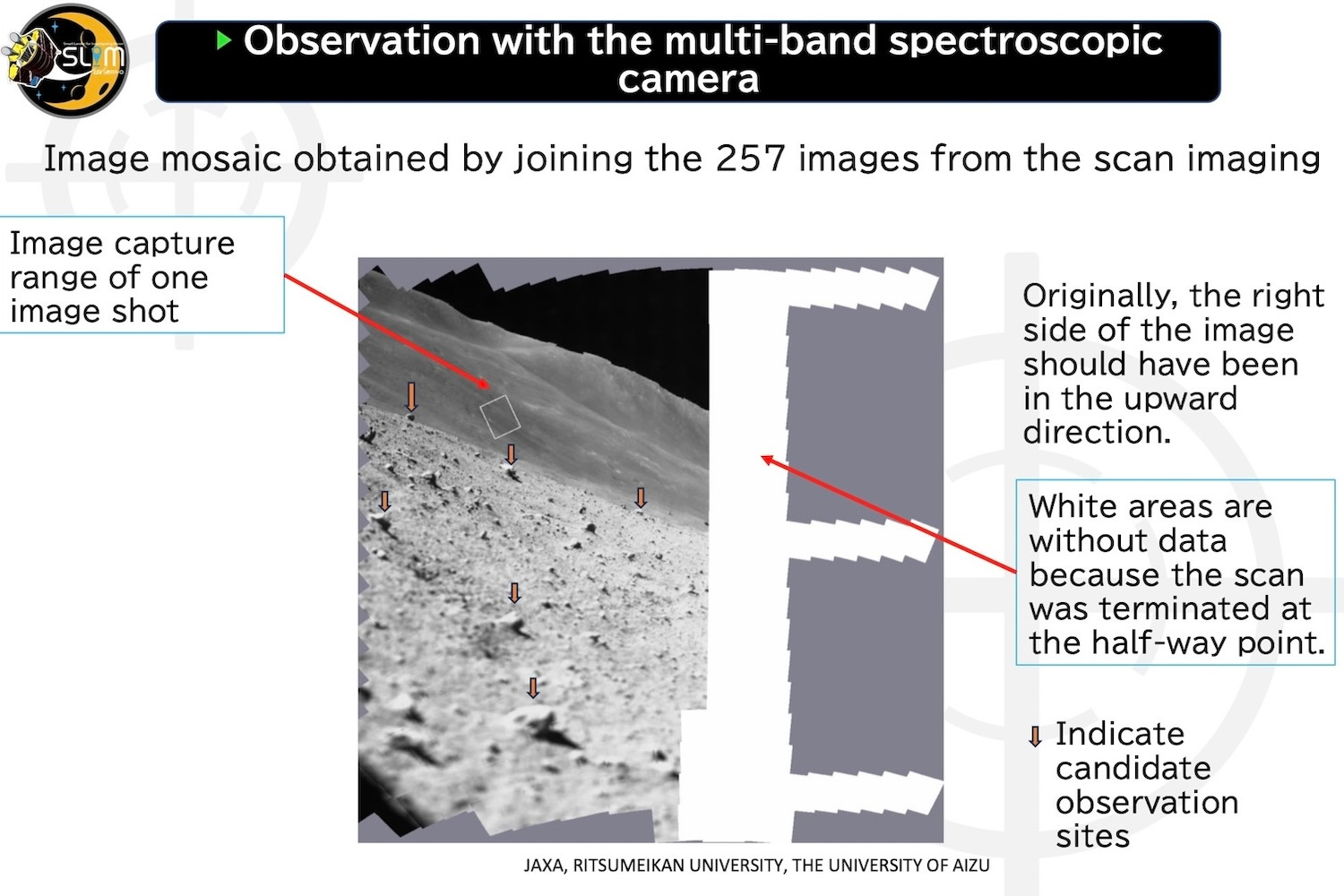
SLIM woke up today, January 29, after the Sun lit the lander’s solar panels from the west. JAXA wasted no time to begin conducting its surface mission of analyzing the composition of Shioli crater’s ejecta using a near-infrared, multi-band spectroscopic camera, which might give scientists insights about our Moon’s mantle and its formation. When SLIM was briefly operational post-landing, JAXA imaged parts of the surface using the instrument, and mission scientists even identified specific rock targets to spectrally analyze if and when the lander woke up—which it now has. Here’s hoping JAXA can get a lot of the surface science mission done before the Sun sets for it on February 2.
The two small “Lunar Excursion Vehicles”, or LEVs, that SLIM deployed during descent at about five meters altitude have also demonstrated their abilities. JAXA said the two-kilogram LEV-1 hopper leaped on the Moon as planned, and directly communicated with Earthly ground stations, which made it the world’s smallest and lightest hardware to directly transmit data from Luna to Terra. The 250-gram, tennis-ball-sized crawler called LEV-2 also worked, and relayed an image of the flipped SLIM lander via LEV-1, providing us all a clear visual confirmation of the landing’s climax.
A new era of robotic surface science and exploration
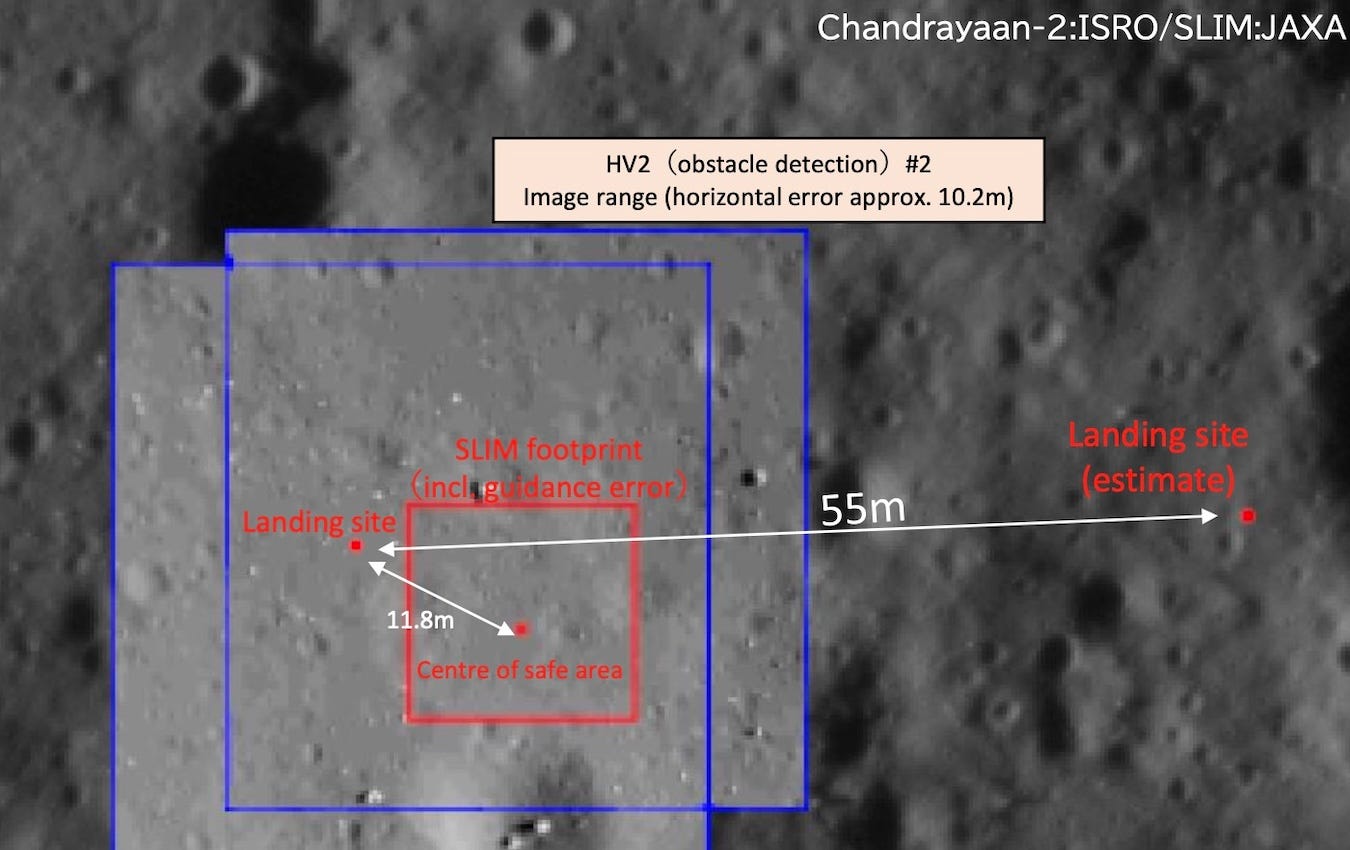
Remarkably, because SLIM had been acing its lunar descent until the point at which it lost an engine nozzle, the spacecraft achieved its ‘pinpoint landing’ goal anyway by landing 55 meters from the center of its incredibly tight landing ellipse of 100 by 100 meters. JAXA says without the engine anomaly, SLIM could’ve touched down at least five times closer! In any case, SLIM goes down in history as the most precise robotic planetary landing ever. As covered in the previous Moon Monday, this has implications for more demanding future missions by Japan, India, and the US to explore the Moon’s rocky south pole and better access nearby water ice lying inside permanently shadowed regions. Just as importantly though, SLIM’s success will now lead to sophisticated surface science missions too:
- For example, scientists asserted in 2021 that due to scientific instruments becoming increasingly sophisticated, even low-cost robotic surface missions—and specifically those without sample return or crew—can help answer fundamental lunar & planetary science questions by focusing on precisely measuring trace elements. However, the generally immobile landers post touchdown and limited drive ranges of small rovers have kept such instruments from being right on or near the scientifically apt patches as identified from orbital data. With SLIM-like precision landings, that’s now possible.
- Such precision landings will also enhance robotic sample return missions, where retrievals like in the case of China’s Chang’e 5 mission have otherwise accepted higher tolerances in landing accuracies. Robotic missions can now have better chances of bringing material to Earth that have high fidelity to precise scientific objectives, such as, say, bringing home the Moon’s mantle material.
Many thanks to Epsilon3, Nathan Price and Ashish Gupta for sponsoring this week’s Moon Monday. If you love my work too, join them!
How India’s Chandrayaan 2 orbiter helped SLIM nail the landing
At the heart of SLIM’s precision landing ability is what JAXA calls “vision-based navigation”, wherein it compares images of the Moon it snaps at critical points during its descent to preloaded onboard orbital maps within just a few seconds to know where it is and to determine where it needs to go. These maps come from NASA’s Lunar Reconnaissance Orbiter (LRO), ISRO’s Chandrayaan 2 orbiter, and JAXA’s own SELENE craft, each uniquely useful at various heights.
During the January 25 press conference, JAXA said that the SLIM mission used high-resolution imagery from the Chandrayaan 2 orbiter for selecting the final target landing site pre-launch as well as for the lander’s final descent phase. This is because the orbiter boasts an imaging resolution in the range of 0.25–0.30 meters/pixel, which is roughly twice LRO’s finest. Such high resolution is useful in the final descent phase where otherwise standard orbital maps are rendered less useful for a lander now too close to the surface. While most modern robotic landers, including most recently India’s own Chandrayaan 3, can find a good landing spot on their own in this final phase, the lack of a relevant last-mile map can affect the landing precision.
SLIM’s case highlights how India’s Chandrayaan 2 orbiter can provide advanced orbital data to help NASA and its partners better plan upcoming robotic & crewed Artemis missions. This has largely remained an untapped opportunity despite a formal report from US scientists recognizing the orbiter’s unique ability. There have been a handful of exceptions though, such as a NASA-ISRO team utilizing the orbiter’s radar to uniquely characterize the Artemis III candidate landing regions. At the last annual meeting of the NASA-backed Lunar Exploration Analysis Group (LEAG) in September 2023, LRO project scientist and Science Lead for Artemis III, Noah Petro, said:
The Chandrayaan 2 orbiter is a valuable asset at the Moon. Its data is helping build on the LRO foundation by filling important needs, and we’re very much looking forward to more data from the mission!
More mission updates
- SpaceX and Intuitive Machines are targeting launch of the latter’s first Moon lander on February 14. The mission, named IM-1, will carry six NASA science & technology payloads as part of CLPS. A separate, commercial telescope called ILO-X from Hawaii-based ILOA will also be aboard. While CLPS competitor Astrobotic’s first lunar landing mission failed earlier this month, Intuitive Machines has continued to show confidence in their attempt. The company earlier told Jeff Foust of SpaceNews that they have studied recent failed Moon landing attempts to subdue any similar weaknesses in their lander, such as having dissimilar redundant inertial measurement units—the lack of which afflicted the lunar descent of Israel-based SpaceIL’s Beresheet lander.
- NASA’s decision to launch the upcoming US-led Gateway international lunar orbital station’s habitat module mated to its power & propulsion one led to some mass constraints, which combined with evolving Gateway requirements from NASA have resulted in habitat module contractor Northrop Grumman taking a $100 million hit out of a $935 million fixed-price contract, Jeff Foust reports.
More Moon
- Belgium became the 34th country and the 13th European nation to sign the US-led Artemis Accords for cooperative lunar exploration. Jeff Foust notes that Belgium is the fifth largest contributor to ESA, after Germany, France, Italy, and the UK. As such, all these contributors are now signees of the Accords.
- To achieve the ambitious Artemis Moon landing missions for NASA, both SpaceX and Blue Origin must prevent cryogenic fuels in their respective lunar craft from boiling off in the weeks and even months they spend in cislunar space. They must also be able to accurately assess the remaining fuel at any given point in time, a task made challenging due to lack of gravity. To improve fuel estimations, NASA says it will soon fly an agency-developed radio-based gauging technique on an unspecified upcoming Moon lander from Intuitive Machines as part of CLPS.
- New research from Western University discovered the mineral apatite in a meteorite sample once part of the old crust of our Moon. This reinforces the recently developed idea that the young Moon may have had considerably more water than what the Apollo sample findings suggest.