How Chandrayaan 3 made its historic touchdown on our Moon

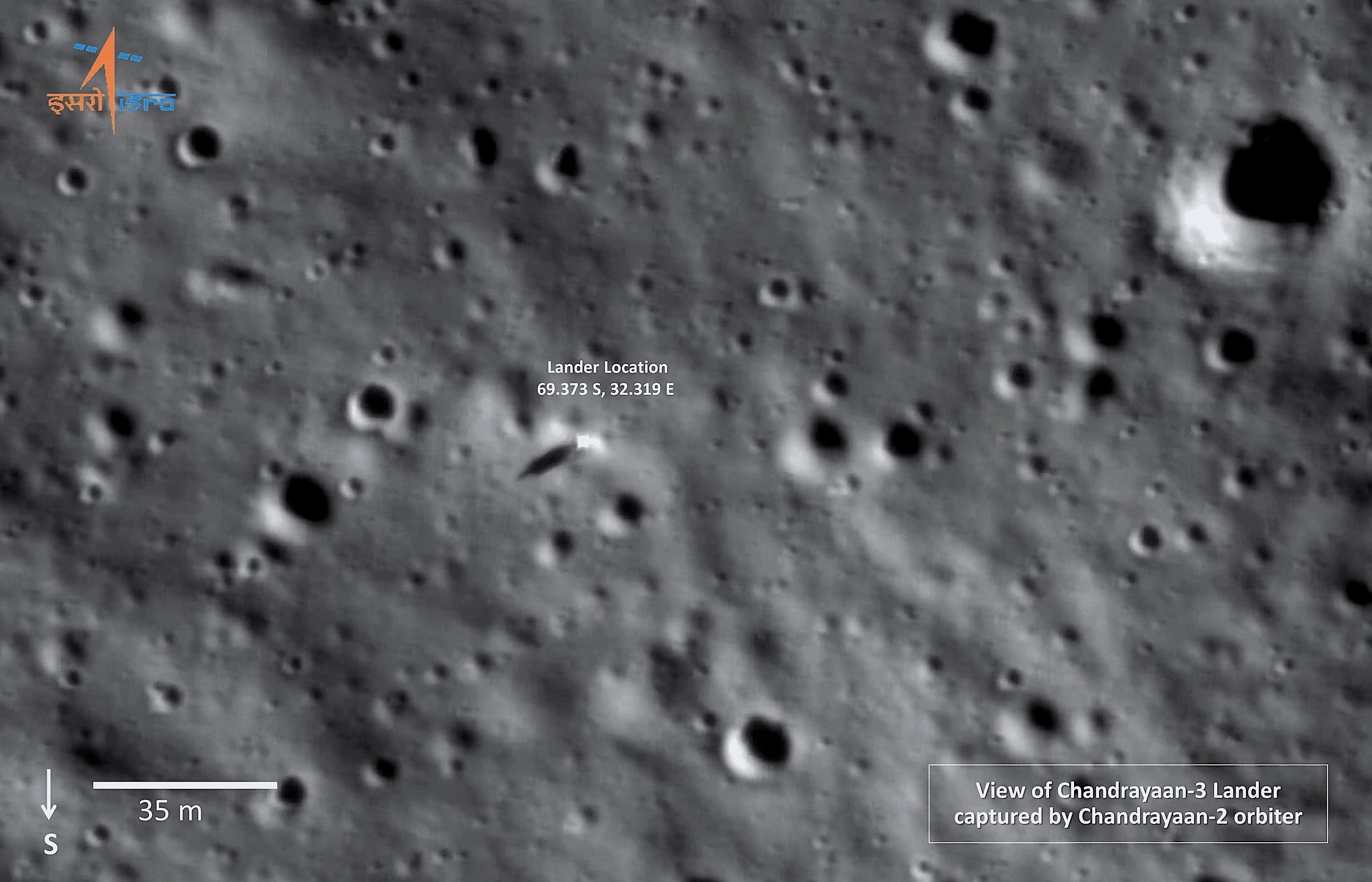
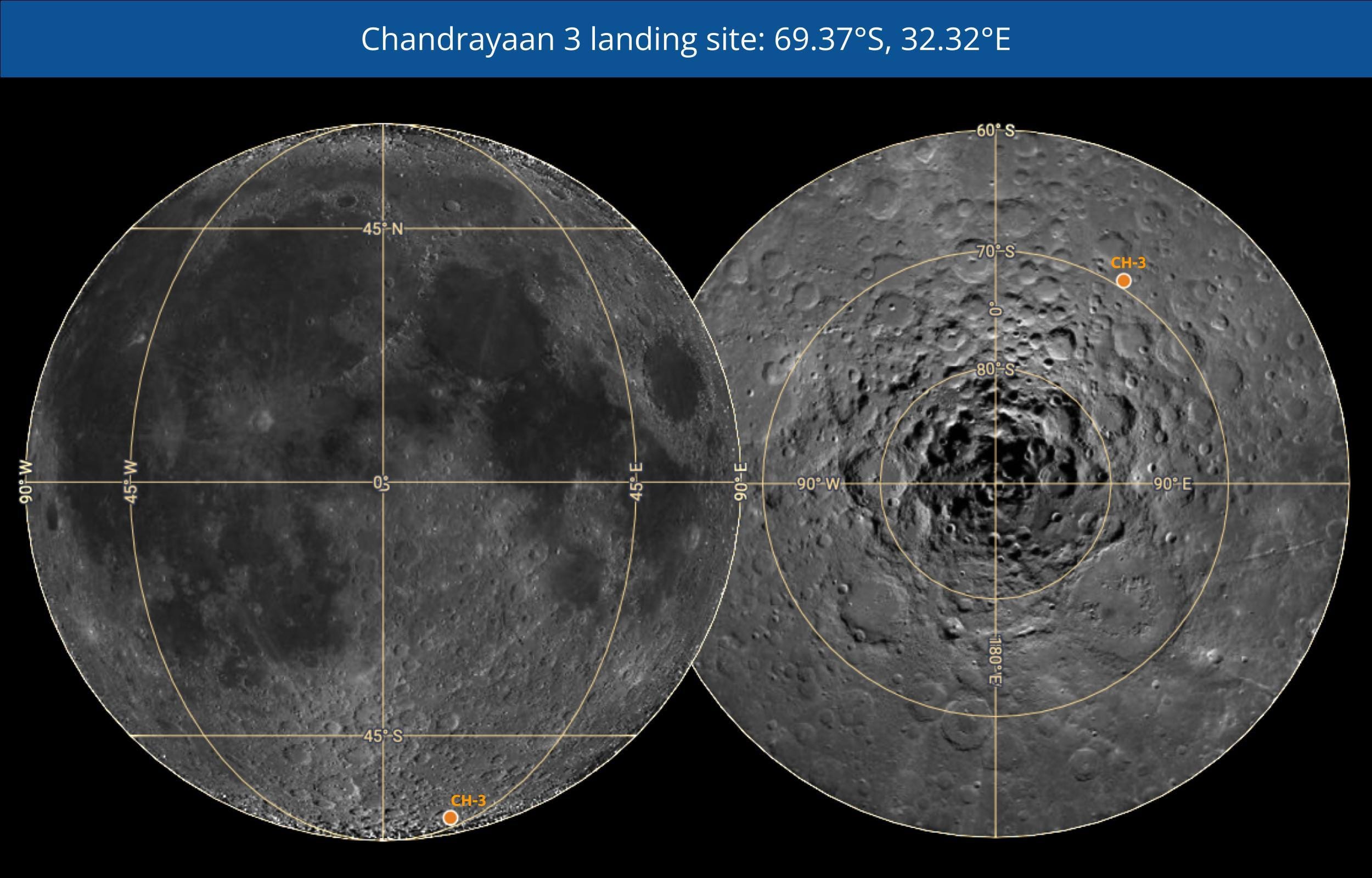
On August 23 at 12:33 UTC, India’s Chandrayaan 3 robotic lander touched down on the Moon near its south pole at 69.37°S, 32.32°E. The triumphant touchdown made India only the fourth country to achieve the feat of a soft lunar landing, following the former Soviet Union, the US, and China.. I spoke to several lunar lander engineers to lay out how Chandrayaan 3 autonomously orchestrated the firing of its engines based on sensor inputs throughout the nerve wracking ~19-minute descent.
Launched on July 14 by the Indian Space Research Organization (ISRO), Chandrayaan 3 was the result of the space agency doubling down on its bet on lunar landing after the unfortunate crash of Chandrayaan 2 in 2019. With the Chandrayaan 3 lander, named Vikram, now safely on the Moon, ISRO’s efforts paid off.

Chandrayaan 3’s entire lunar descent had to be fully autonomous. During this crucial stage of the mission, signals take about three seconds to go from the lander to Earth and back again—a delay too long for earthbound ISRO engineers to reliably guide the landing. So Vikram’s task was to reduce its high orbital velocity to zero such that it would stay as close to its intended trajectory as possible, all the way until a safe touchdown. To do so, it needed to orchestrate the firing of its engines based on continuous measurements of distance, velocity, and orientation.
To stick the landing this time around, ISRO built far more redundancies and safeguards into Chandrayaan 3 than it had for Chandrayaan 2. In an August 5 talk detailing these changes, ISRO’s Chief S. Somanath emphasized how Chandrayaan 3 carried more fuel and a better guidance, navigation & control system to correct even major deviations from the intended paths. “There were improvements to 21 subsystems for Chandrayaan 3. These changes have been reinforced by numerous helicopter- and crane-based ground tests,” says Nilesh Desai, director of ISRO’s Space Applications Center (SAC) in Ahmedabad, India.
Evidently, these improvements culminated in Chandrayaan 3 standing tall on the Moon. This success wasn’t a given, especially when considering that four out of the previous six lunar landing attempts within the past five years have failed. The latest failure occurred on August 19, when Russia’s Luna 25 spacecraft misfired its engines and crashed into the Moon—a brutal reminder that getting to the lunar surface in one piece remains risky. Luna 25 thus joins the ruins of the Israel-based company SpaceIL’s Beresheet, India’s Chandrayaan 2, and the private Japanese firm ispace’s Hakuto-R spacecraft. Thankfully, at least Chandrayaan 3’s outcome has instead followed those of China’s Chang’e 4 and Chang’e 5 landers, the only other recent successes.
“We now have a tremendous responsibility to inspire India and the world at levels no less than this landing,” said Mr. Sankaran Muthusamy, director of the U R Rao Satellite Center (URSC), the ISRO center that led the building and integration of the Chandrayaan 3 spacecraft and mission.
How Chandrayaan 3 aimed for the Moon
{kind=link}
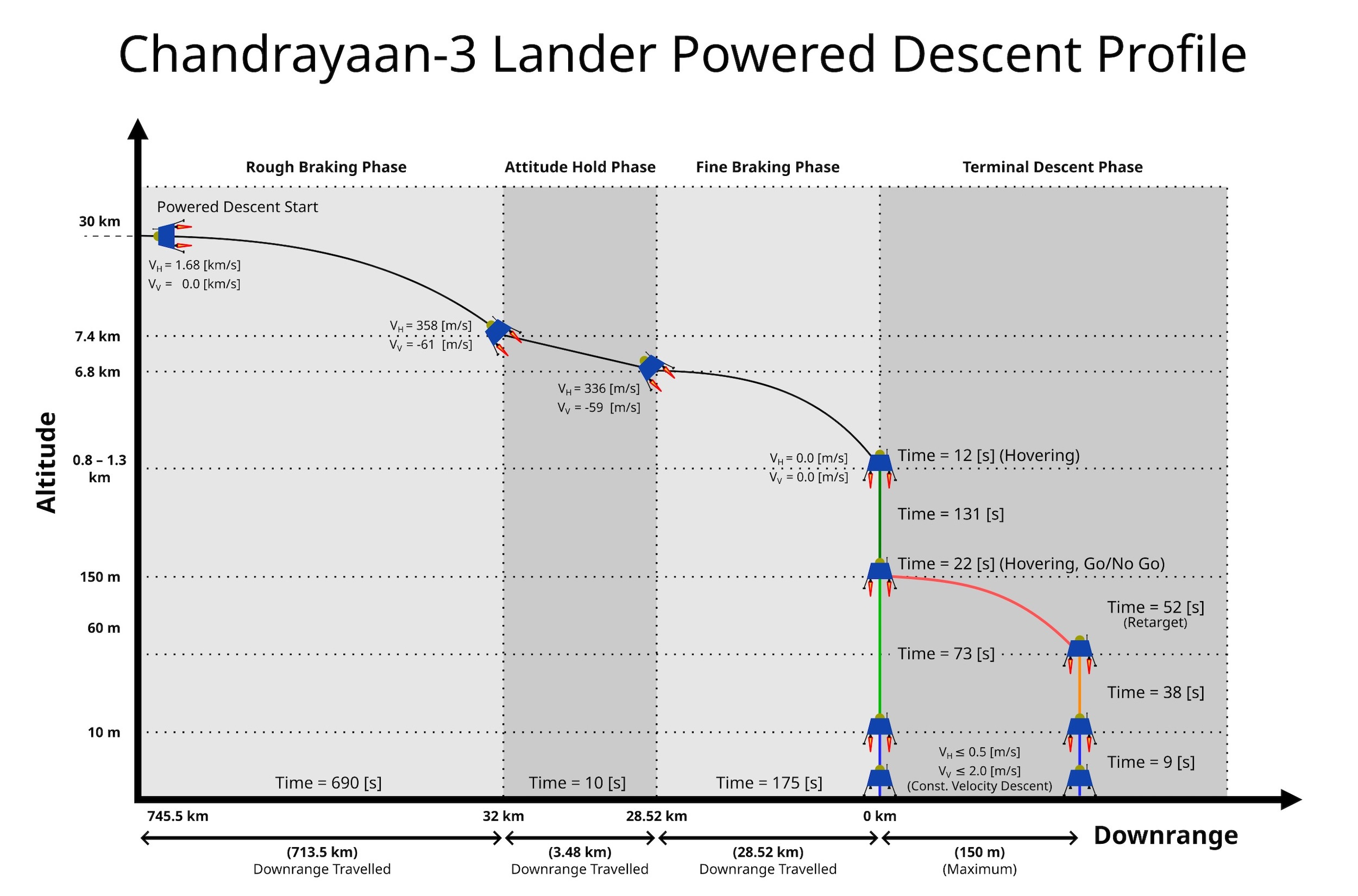
Chandrayaan 3’s about 19-minute-long lunar descent comprised four major phases. The first, the “rough braking” phase, began when the spacecraft was 30 kilometers above the Moon in its orbit and about 750 kilometers downrange from its landing site. By firing all of its four 800-newton main engines for about 12 minutes until it was at a 7-kilometer altitude, Chandrayaan 3 reduced its high horizontal velocity of about 1.7 kilometers/second by some 80 percent.
Next came a brief but crucial 10-second “attitude hold” phase, wherein the lander stabilized itself using its eight smaller thrusters to gain a steady view of the looming lunar surface for its various landing sensors.
For height measurements, Chandrayaan 3 relied on two altimeters, one using lasers and the other using microwaves. While laser altimeters are commonly employed by several lunar landers, they can report anomalous heights at times if, say, a lander passes over mountainous terrain or large craters. “Instead the microwave altimeter’s wider footprint allowed Chandrayaan 3 to better tolerate abrupt changes in altitude,” explains Priyanka Mehrotra of SAC, who is lead system designer of Chandrayaan 3’s Ka-Band microwave altimeter.
Where past landings faltered
Chandrayaan 3’s redundant altimetry is especially pertinent because of the role laser altimetry played during the failed April 25 touchdown of ispace’s first lunar lander. As that lander passed over the rim of the Atlas Crater to approach the target landing site that lay within, its laser altimeter correctly reported an increased elevation of roughly 3 kilometers, corresponding to the crater’s depth. But onboard software designed to filter out certain abrupt values to keep the ispace lander’s motion stable rejected the measurement as erroneous. The Japanese lander, thinking it was closer to the surface than it really was, continued decelerating slowly until it ran out of fuel and fell to a ruinous crash landing.
It was during the attitude hold phase that Chandrayaan 2 faltered. Its engines provided a slightly greater thrust than expected because of an inadequately functioning thrust control valve, which accumulated navigation errors over time. ISRO had designed the onboard computer to correct such “off-nominal” paths only after the attitude hold phase ended. But the deviation quickly grew to be so large that the lander couldn’t correct it in time despite its ability to throttle its thrust. In response, ISRO ensured that Chandrayaan 3 could determine and correct such deviations from its intended trajectory far faster than its failed predecessor.
Chandrayaan 3’s lander also used a new instrument called a laser doppler velocimeter (LDV) to navigate more precisely in the first place. “While there are other ways for a lunar lander to measure its velocity, an LDV provides a direct measurement of velocity with respect to the ground, which allows a lander to greatly reduce accumulation of navigation errors,” says William Coogan, lunar lander chief engineer at Firefly Aerospace, a private company that has partnered with NASA via the space agency’s CLPS program to deliver science and technology payloads to the Moon in 2024 and 2026. However, in a post-landing interview with Republic World, ISRO Chief S. Somanath said that Chandrayaan 3’s descent and landing went so nominally that the laser doppler velocimeter ISRO had added for redundant velocity measurements didn’t end up being required.
After its fraught attitude hold phase, Chandrayaan 3 entered a three-minute “fine braking” phase in which it used only two of its four main engines to descend up to roughly 850 meters above the Moon’s surface and briefly hover there. This pause gave the lander a chance to capture pictures of the surface and compare them to preloaded onboard satellite images to determine whether it was above its desired landing region.
“Chandrayaan 3’s target landing zone spans 4 by 2.5 kilometers. ISRO scientists and engineers divided it into 3,900 equal-sized subsections, meticulously assessed the safety level of each for a landing, and loaded it into the lander as reference information,” Desai says. At this point, Chandrayaan 3 found itself above this predetermined landing zone, and so its onboard computer identified the safest feasible subsection area and accordingly proceed toward touchdown. Had Chandrayaan 3 found itself elsewhere, it would have proceeded with an autonomous landing based on self-identified hazards from its imagery instead of the preprogrammed subsection-based landing.
The moment of touchdown
In the final “terminal descent” phase, Chandrayaan 3 lowered itself to about 150 meters above the surface and then hovered again for about half a minute to assess the area below for landing hazards. At this point, since the surface right below the lander didn’t look safe, the lander sought a safer adjacent area and deviated to touchdown there.
“The processing system for hazard avoidance was sped up for Chandrayaan 3 to make the lander’s decision-making during the critical final phases significantly faster than Chandrayaan 2,” says Rinku Agrawal of SAC, who led the team that developed the processing unit of the hazard detection and avoidance system.
“Hazard detection and avoidance allows for a critical divert maneuver if needed during the final moments to ensure a safe touchdown,” says Ander Solorzano, flight director of aerospace company Astrobotic Technology’s first Moon landing mission, which will carry NASA CLPS and international payloads.
Finally, on touchdown, sensors on the lander’s legs triggered the shutdown of its main engines. ISRO designed the lander’s legs to absorb most of the mechanical shock from the touchdown. The agency tested the legs on lunar simulant test beds on Earth to ensure that the lander could tolerate a high vertical velocity of three meters per second—and even a horizontal velocity of one meter per second if it were to touch down askew. Chandrayaan 3’s touchdown on the surface was smooth, with a vertical velocity of 0.983 meters/second—notably less than the nominally expected upper bound of 2 meters/second.
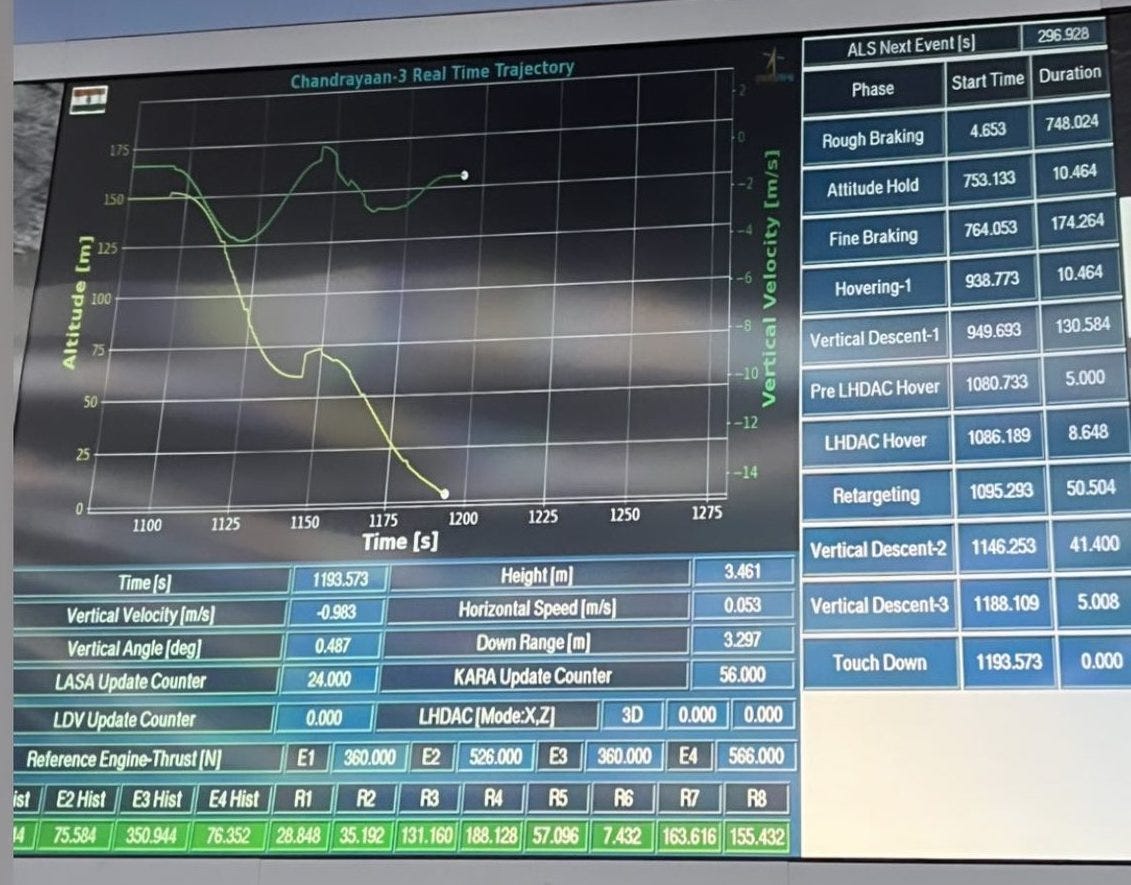
The final location of 69.37°S, 32.32°E places Chandrayaan 3 just ~350 meters away from the targeted spot. It’s even more impressive when we consider that in the final descent phase the lander swiftly identified the area beneath it to be unsafe for touchdown and the live data graph at Mission Control read “RE-TARGET”, which it then did!
The surface mission
ISRO, most media publications worldwide, and many social media influencers have been touting Chandrayaan 3 as the first mission to land on the Moon’s south pole. But this is incorrect.
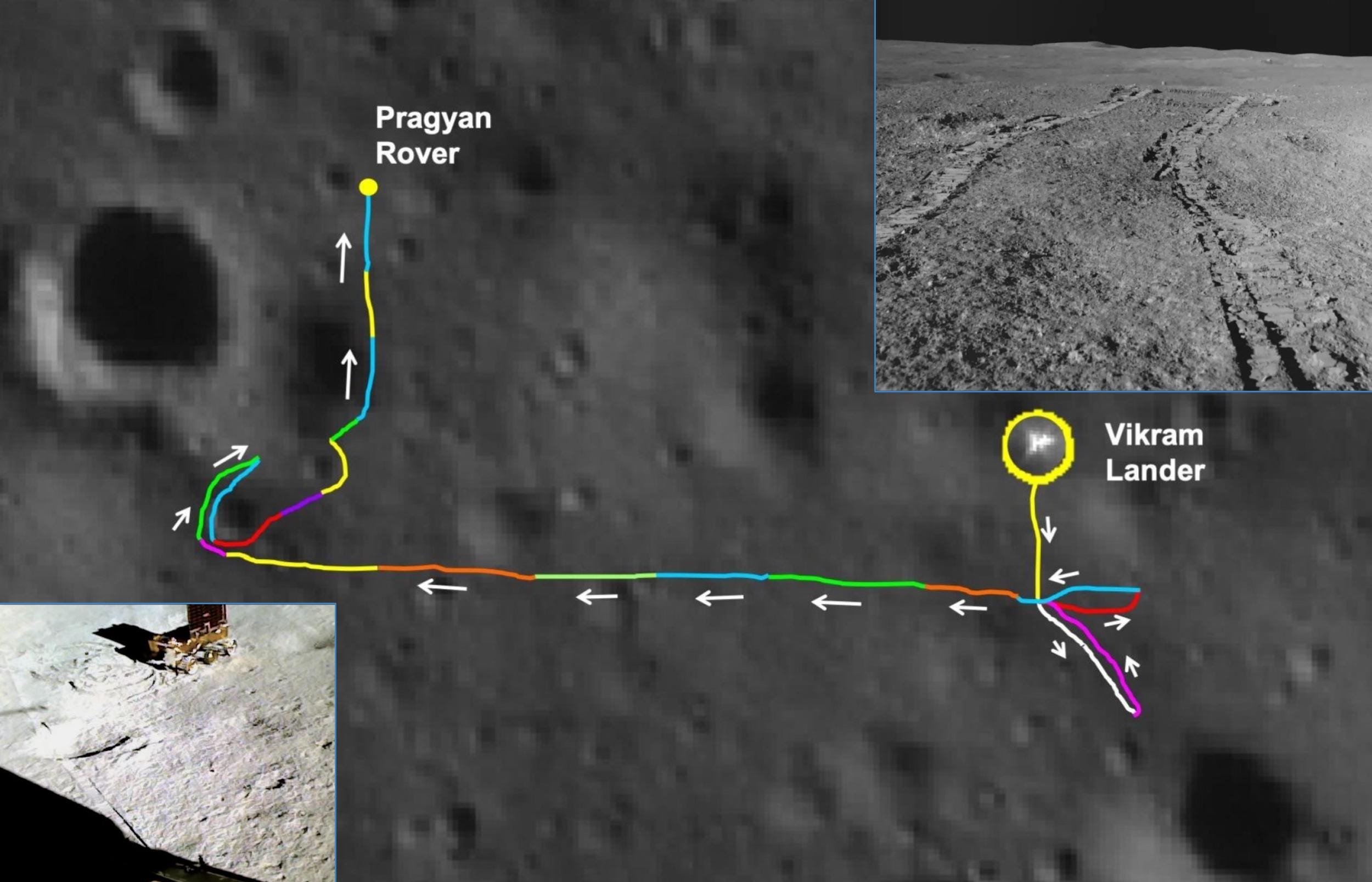
Anyway, Chandrayaan 3 landed a day after local dawn to maximize the solar-powered lander and rover’s surface operations lifetime to most of the lunar daylight period of 14 Earth days. ISRO powered on the lander’s three active instruments on August 24, each of which returned data for 11 days since. From August 25, the rover began exploring the geologically rich landing region and traversed 100 meters on the lunar surface over 10 Earth days. This is shorter than the originally expected drive of 300–400 meters.
ISRO has shared summaries of initial data from each of Chandrayaan 3’s experiments, with actual science results to only come later, of course. Based on the initial data, the expected science output from Chandrayaan 3 seems to be mostly deliverable.
India’s Next Moonshot
Chandrayaan 3 feeds into the global frenzy of sending hardware to the Moon, particularly to its south pole. The US’ upcoming Artemis crewed missions, China’s Chang’e robotic craft and the majority of other governmental as well as private endeavors such as those under NASA’s CLPS program plan to explore this valuable lunar region. They eventually aim to extract its water ice and other resources to sustain long-duration missions and perhaps even to commercialize aspects of such operations.
It was thus quite the timing when, on June 21, India signed the Artemis Accords, a US-led framework for cooperative lunar exploration. As a signatory, India can now accelerate its lunar endeavors by better collaborating with the US and other signatory nations. Astrobotic CEO John Thornton says, “I’m encouraged by India’s signing of the Accords. It’s certainly a signal for extended partnerships and co-developments between the two countries. The more we can do that as a species, the better chance we have of succeeding together.”
For its next Moon mission launching before the end of decade, India is partnering with Japan to have the LUPEX rover directly study the nature, abundance, and accessibility of water ice on the Moon’s south pole. “LUPEX requires a more precise touchdown with a much bigger lander. Chandrayaan 3’s success will act as a stepping stone towards India building LUPEX’s lander and thus playing a key role in the future exploration of our Moon,” says S. Megala, the Deputy Director of ISRO’s Lunar Science & Exploration program.
Seeing that both Japan and India are signatories of the Accords, LUPEX will likely also feed into the critical data on which future crewed Artemis missions will bank. The Japanese government has already approved the LUPEX mission but India is yet to, and so that will be the green light to look out for next now that Chandrayaan 3 is successful.
Originally published on Scientific American, and tweaked for my blog.