Moon Monday #160: On Japan’s breakthrough with SLIM and investing in a lunar future
Traveling in another continent presented several challenges for me to work on this week’s Moon Monday, which is why it’s slightly delayed. But I wanted to make sure to get it right because SLIM’s incredible lunar landing is a win in multiple ways. Hope you like this edition, transmitted to you from Luxembourg!
SLIM’s Moon landing paves the way for more demanding missions for Japan, India, and Artemis
On January 19 at about 3:20PM UTC, JAXA’s $121 million SLIM lander successfully touched down on the Moon within the rocky ejecta of the 300-meter wide Shioli crater. This made Japan only the fifth country in the world to achieve a soft lunar landing, and JAXA just the second organization after CNSA to successfully do so on their first try.
Unfortunately, for an as-yet-unidentified reason, SLIM’s novel thin-film solar sheets weren’t generating power on the surface. The lander was operating and transmitting telemetry and imagery on limited battery power. Within three hours, JAXA decided to remotely disconnect SLIM’s batteries while it was at the 12% charge level, and thus the lander powered down. This means SLIM couldn’t carry out its surface mission of analyzing the composition of Shioli crater’s ejecta using a near-infrared, multi-band spectroscopic camera that could’ve give scientists insights about our Moon’s mantle and its formation. JAXA says that because SLIM’s solar panels are facing westward, when sunlight hit the panels towards the end of the local lunar day an Earth week later, SLIM might generate power and hopefully recover for brief operations.
When SLIM was about five meters above the surface during its descent, it successfully deployed two small mobile “Lunar Excursion Vehicles” or LEVs. These comprise the LEV-1 hopper, and the 250-gram tennis-ball-sized crawler called LEV-2. JAXA received communications from both these bots. LEV-1 was supposed to image the lander and its surroundings but we don’t know yet if it did so or transmitted the same.
In any case, what sets SLIM apart from every robotic Moon landing is its goal of achieving a ‘pinpoint landing’ by touching down within an incredibly tight landing ellipse of 100 by 100 meters near Shioli. JAXA originally said it would take a month to determine from orbital data if SLIM achieved this goal. Nevertheless, the agency will provide us an update on the same in a livestream plus press conference on January 25. Such gripping precision isn’t for the sake of a demonstration. The upcoming NASA Artemis crewed missions, China’s Chang’e robotic craft, and the majority of other government as well as private endeavors plan to explore the Moon’s rocky south pole, where such demanding touchdowns are indispensable in most cases to better access nearby water ice lying inside permanently shadowed regions.
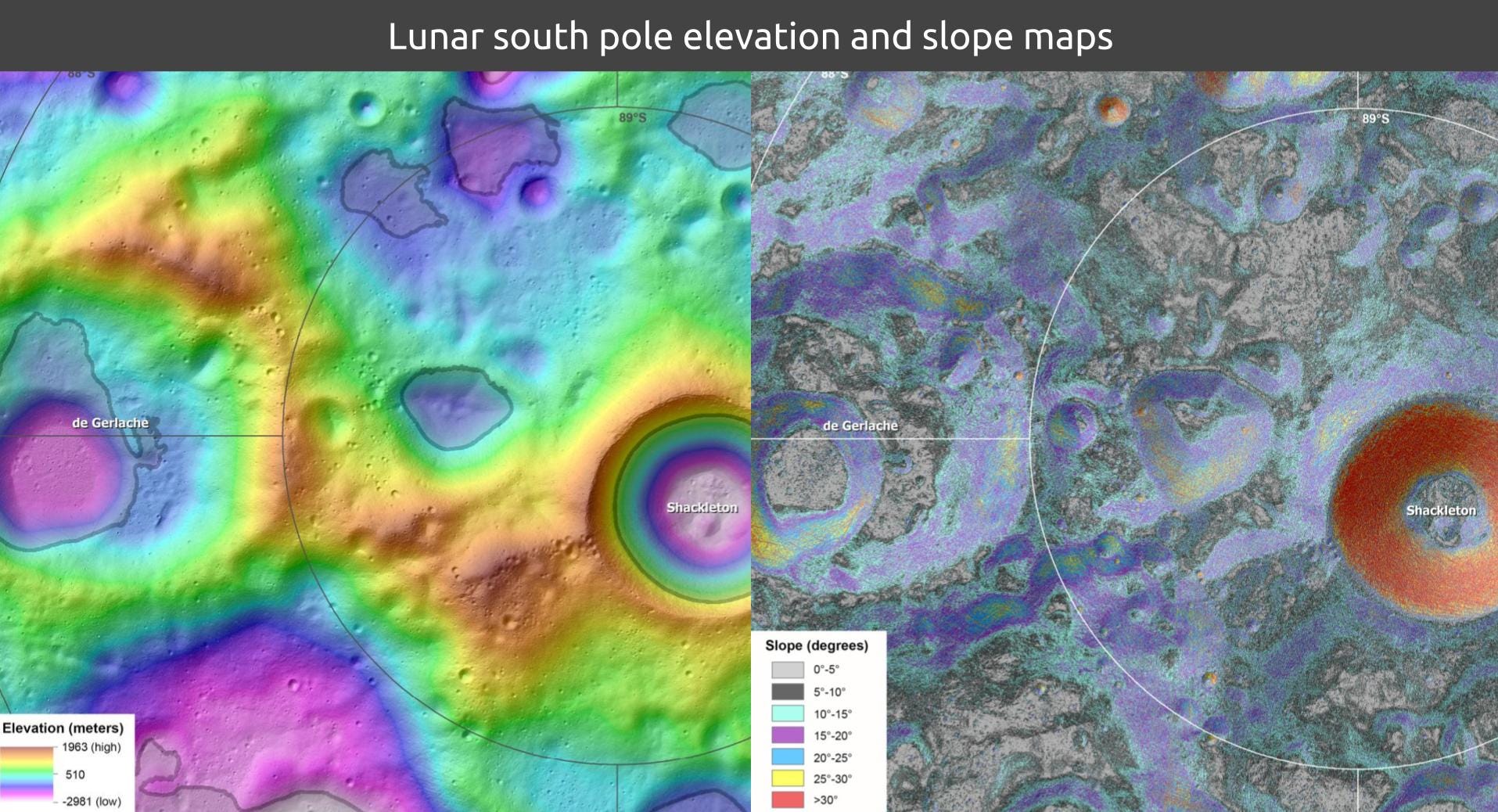
In fact, for its next Moon mission launching before the end of decade, JAXA is partnering with ISRO to have its LUPEX rover directly study the nature, abundance, and accessibility of water ice at 89°S. To safely and precisely land LUPEX amid unforgiving polar terrain, ISRO will build the lander with input from both Chandrayaan 3’s success and that of SLIM. Since both Japan and India are signatories of the US-led Artemis Accords, the engineering as well as the science from LUPEX is expected to feed into the Artemis program in some form. JAXA is also considering flying a LUPEX-class lander by end of decade to deliver cargo for Artemis missions.
Against the contrast of many recent Moon landing mission failures, Chandrayaan 3 and SLIM have thankfully kept the global momentum for the Moon going by feeding into the frenzy of continuing to send robotic missions to Luna.
Tangent: In true Japanese style, there’s a game for you to get a feel for the SLIM mission and its pinpoint Moon landing.
Many thanks to Epsilon3, Gordon Roesler, Henry Throop and Dany Waller for sponsoring this week’s Moon Monday. If you love my work too, join them!
More mission updates
- With a series of 23 small main engine burns on January 18, Astrobotic directed its ailing Peregrine lander to safely enter and burn up in Earth’s atmosphere over the South Pacific Ocean. While the company could’ve avoided terrestrial reentry with the remaining propellent onboard, the company responsibly concluded that risking having an uncontrollable spacecraft littering cislunar space is a bad idea. Nevertheless, Astrobotic’s failed lunar landing mission has many implications for the company’s expansive future Moon missions and ambitions, from delivering the water-hunting VIPER rover for NASA to hopes of operating commercial lunar power grids and versatile autonomous rovers.
- On December 12, 2023, NASA’s Lunar Reconnaissance Orbiter (LRO) successfully laser-pinged the agency-provided small retroreflector sitting on top of ISRO’s Chandrayaan 3 lander. This first-of-a-kind demonstration is a stepping stone towards a future where Mooncraft with purpose-built lasers can locate such targets and land near them as they arrive. For example, this technique will be relevant for repeated cargo deliveries near future habitats. While LRO’s laser altimeter wasn’t built for this purpose, it’s nevertheless playing a pathfinding role to said end, which NASA will continue refining with the retroreflector the agency also has aboard SLIM.

Organizations worldwide continued investing in a lunar future
- ESA has been stockpiling quite a lot of Moon-like anorthosite rock material from Greenland to prepare several kinds of lunar soil simulants in the lead up to opening the versatile VULCAN and LUNA testbeds in the UK and Germany respectively. These facilities will be used to test both robotic and crewed exploration activities. Related tangent: For testing Chandrayaan landers and rovers, ISRO developed a lunar-highland-like soil simulant called LSS-ISAC-1 by sourcing naturally occurring anorthosite rock fragments from the Sittampundi Anorthosite Complex in southern India.
- Continuing to plan for future lunar exploration, the Italian Space Agency is funding construction of the Lunar Robotic Mission Simulation and Control Center in Turin. Once operational by 2027, it will be used to complement the European Space Agency Rover Operation Control Center (ROCC), which is also in Turin. Other related things the agency is funding is an oxygen extractor demonstration mission by 2028, and a multipurpose surface habitation module for Artemis Basecamp.
- ispace Japan and Orbit Fab entered a partnership with a futuristic focus on refueling landers and other Moonbound hardware with lunar resources such as water ice. Relatedly, the UK Space Agency and the Canadian Space Agency are co-hosting the $2.2 million Aqualunar Challenge, encouraging people to develop technologies that remove contaminants from lunar water so as to purify it for consumption by future astronauts.
- As expected, NASA has finally formally asked SpaceX and Blue Origin to begin work on developing cargo variants of their crewed lunar landers with SpaceX Starship and Blue Moon respectively, Jeff Foust reports. NASA wants such cargo flights, which begin from Artemis VII in the 2030s, to support future astronauts and habitats by delivering a bare minimum of 12,000 kilograms of cargo per flight. These could include not just crew-critical supplies but also scientific payloads, technical equipments, large rovers, or even habitat modules.
