Indian Space Progress #15: An ISRO-JAXA collaboration for the Moon, aiding Artemis, and more
In this month’s Indian Space Progress edition, I want to highlight how increasing independence in being able to plan and execute planetary missions can lead to uniquely impactful collaborations between organizations globally. India’s Chandrayaan program has been becoming incrementally indigenous, and the two stories below highlight its utility with the case of the Chandrayaan 2 orbiter.
How ISRO’s Chandrayaan 2 orbiter helped JAXA nail SLIM’s Moon landing

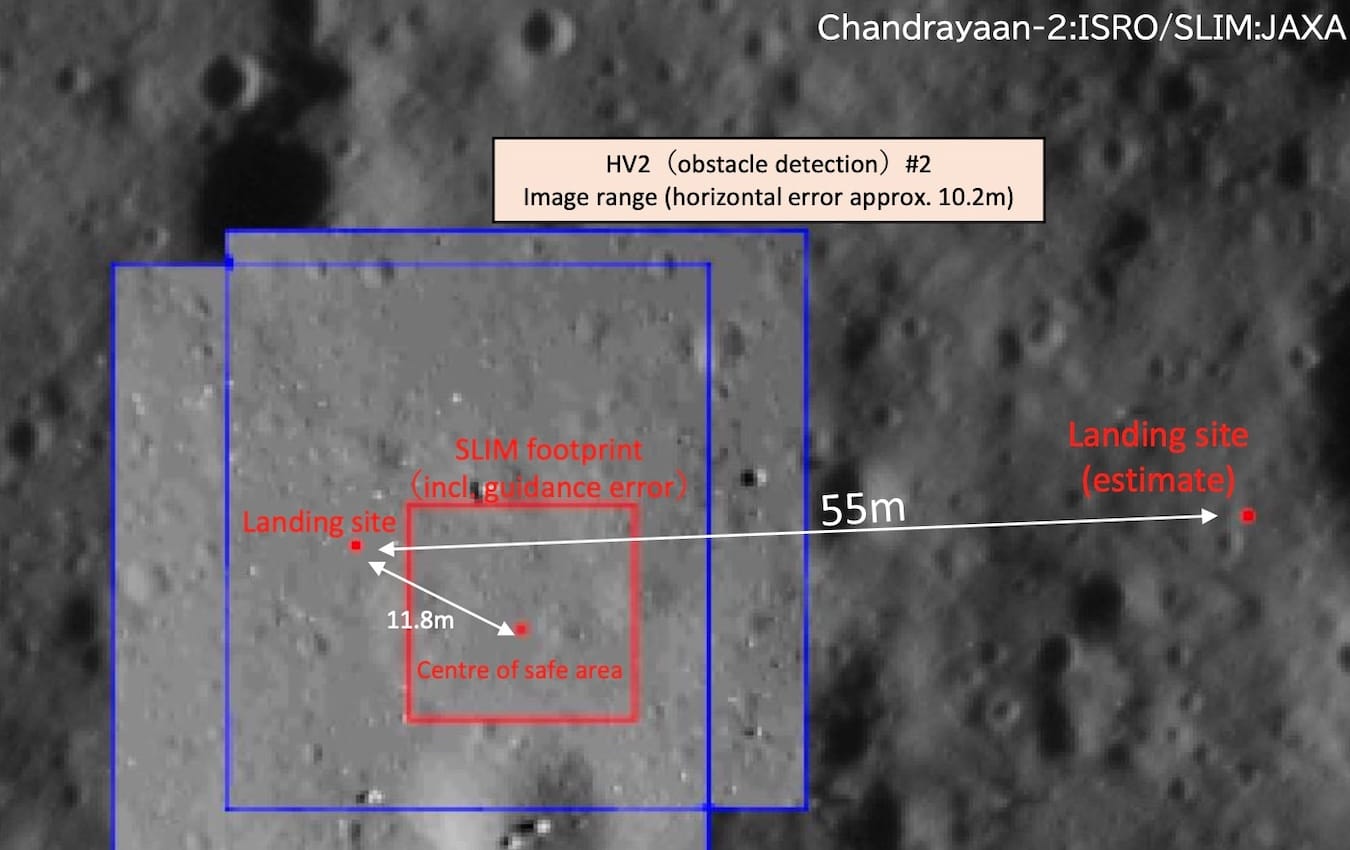
On January 19, the Japanese space agency JAXA’s SLIM lander touched down on the Moon merely 55 meters away from the center of its target spot, making it the most precise robotic planetary landing in history. A key part of how it achieved this feat is a tale of collaboration between JAXA and ISRO.
At the heart of SLIM’s precision landing ability is a technology JAXA calls “vision-based navigation”. During its descent, SLIM snapped images of the Moon and compared them to preloaded onboard orbital maps within just a few seconds to determine where it is and where it needs to go. These maps come from NASA’s Lunar Reconnaissance Orbiter (LRO), ISRO’s Chandrayaan 2 orbiter, and JAXA’s own SELENE craft, each uniquely useful at various heights.
In a post-landing media release, SLIM’s Project Manager Shinichiro Sakai mentioned that the mission used Chandrayaan 2’s imagery not just during the lander’s final descent phase but also to decide the final target landing area pre-launch. This is because Chandrayaan 2’s Orbiter High Resolution Camera (OHRC) boasts a general imaging resolution of 0.2-0.3 meters/pixel, which is about twice LRO’s finest.
“JAXA sent us a request in 2021 to image SLIM’s landing site, and so we planned an orbital passover of the Chandrayaan 2 orbiter to acquire OHRC images for them,” says Amitabh Singh, head of ISRO’s Planetary and Space Science Data Processing Division and a lead scientist on the OHRC team. Then in 2023, ISRO provided JAXA with more images of the landing site from different sun angles, which helped JAXA engineers tune SLIM’s algorithms to instantly identify boulders and other hazards regardless of specific lighting conditions.
Even though most modern robotic landers—including most recently India’s own Chandrayaan 3 and the US-based Intuitive Machines’ Odysseus lander—can find a good landing spot on their own during the final phase of a landing, the lack of an apt last-mile map affects the landing precision.
When SLIM was roughly 50 meters above the Moon’s surface, it hovered and identified touchdown hazards below it using vision-based navigation with Chandrayaan-2 imagery. But at this point one of its two main engine nozzles mysteriously detached, and the resulting off-center thrust made SLIM go sideways. SLIM’s guidance system identified this anomaly, and decided to descend using the hover-phase and onboard imagery while continually trying to stabilize its orientation with the working main engine and smaller thrusters. While SLIM’s vertical velocity of 1.4 meters per second on touchdown was well within acceptable bounds, the eastward lateral motion and touchdown orientation weren’t nominal, causing it to flip on the surface with its solar panels facing away from the sun. Even when afflicted, SLIM could see and target a safe spot to touch down upon and manage to avoid a crash.
India and Japan now look ahead to their next lunar mission called LUPEX, which is a collaborative effort. The nominal six-month mission comprises an ISRO-developed ~6000-kilogram lander which will deliver a JAXA-built ~350-kilogram rover to directly study the nature, abundance, and accessibility of water ice at the Moon’s south pole (between 89–90°S). To safely and precisely land LUPEX amid its unforgiving polar terrain, ISRO will build the lander with input from both Chandrayaan 3’s success and that of SLIM.
ISRO aids Artemis
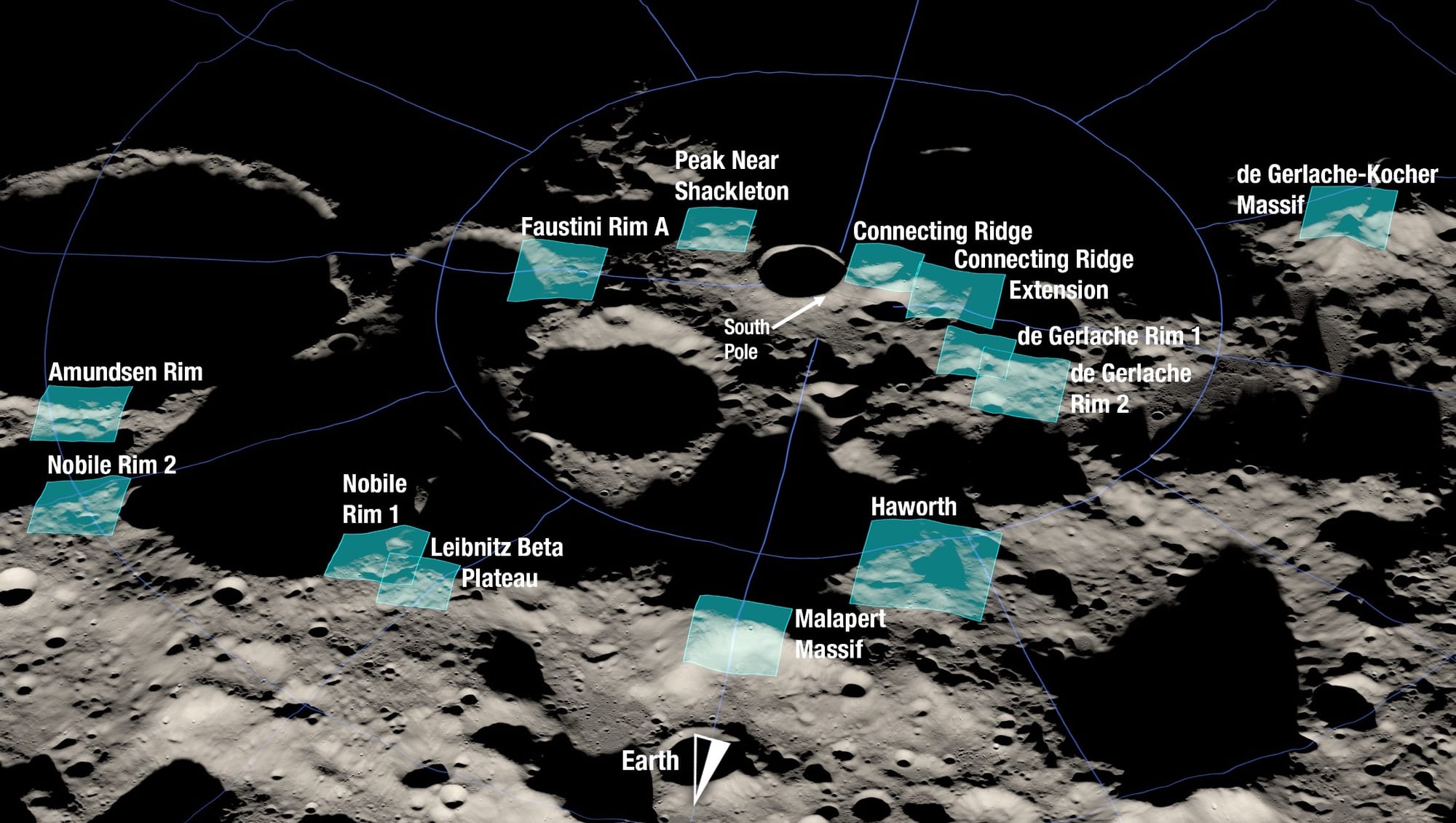
For ISRO, SLIM’s case also highlights how Chandrayaan 2 can provide advanced orbital data to help NASA better filter landing zones for the agency’s Artemis program to land humans on the Moon—especially as the 2009-launched LRO gracefully ages. While this has mostly remained an untapped opportunity, Amitabh says collaboration for the same has started. He adds that due to the rocky nature of the lunar south pole, knowing the height information of terrain features is as important as the imaging resolution. “We use OHRC stereo images to get four times better height point resolution than LRO,” which really helps safely plan a lander’s last leg of the journey.
At the last annual meeting of the NASA-backed Lunar Exploration Analysis Group (LEAG) in September 2023, LRO project scientist and Science Lead for Artemis III, Noah Petro, reaffirmed this collaborative value by saying:
The Chandrayaan 2 orbiter data is helping build on the LRO foundation by filling important needs, and we’re very much looking forward to more data from the mission!
Some such progress was also seen at the 54th Lunar and Planetary Science Conference (LPSC) in 2023, where Wes Patterson of the LRO team collaborating with ISRO SAC scientists described how they’re using complementary radar data from LRO and the Chandrayaan 2 orbiter to uniquely characterize the Artemis III candidate zones. This included getting valuable information on landing hazards within those sites, better seeing permanently shadowed regions than optical imagers, and gaining a better, broad sense of the physical states of the regions from inferred physical properties.
At the 55th LPSC last month, signs of such work continued to be visible as lunar researchers presented their work of using Chandrayaan 2 orbiter data to help downselect areas within the Artemis III candidate zones via infrared and multi-band radar measurements, the former to help find spots with water ice and the latter to help reduce false positives from terrain with rough textures only seeming like water ice.
As a related tangent, the UK Space Agency announced in February that it’s funding Royal Holloway, University of London (RHUL) with £306,000 to develop software for the Chandrayaan 2 orbiter to help its multi-band radar better detect underground water ice on the Moon’s south pole. UKSA, RHUL, and ISRO hope to use the same advancement for mapping Venus in high resolution using the radar on India’s upcoming Shukrayaan orbiter. [Note: Shukrayaan is not yet a commissioned mission from the Indian Government, and might not launch before end of decade.]
This story is partly excerpted, adapted, and enhanced from my article on precision Moon landings and the future.
Many thanks to the Takshashila Institution, KaleidEO and Gurbir Singh for sponsoring this month’s Indian Space Progress report. If you love my work too, join them!
More Indian Space
- Doubling down on space sustainability goals, ISRO Chief S. Somanath announced on April 16 at the annual meet of the Inter-Agency Space Debris Coordination Committee (IADC) that India wants to achieve debris-free [new] space missions by 2030. Relatedly, ISRO released its 2023 space situational awareness report this month. The PDF isn’t public on the Web but ISRO has provided a good summary blog post. Also related: Bengaluru-based Digantara opened up Asia’s first dedicated center for space traffic monitoring on April 19. The center will also allow Digantara to assemble their upcoming satellite constellation dedicated to space-based tracking of orbital objects—a world first. The company raised $10 million in June 2023 for the same.
- Hyderabad-based Dhruva Space raised $15 million, and will use the funds to begin setting up the previously announced 26,000 square-meter spacecraft manufacturing facility. On a related note, recall that in August 2023, New Space India Limited (NSIL)—a government company commercializing Indian space technologies—transferred the technology of ISRO’s IMS-1 small satellite bus to Dhruva Space and another private firm Alpha Design Technologies, marking the beginning of such satellite tech transfers to the private Indian space industry as part of a broader national push for commercializing space. ISRO has flown IMS-1 on three Earth observation missions.
- KaleidEO, a subsidiary of Bengaluru-based SatSure (and an Indian Space Progress sponsor), announced on April 18 successfully testing their in-house developed optical and multispectral imager on an aircraft to validate its performance. Recall that SatSure raised $15 million in August 2023 with an aim to build KaleidEO’s four 100-kilogram, Very Low Earth Orbit satellites touting these imagers. The company hopes to launch the satellites in Q3 2026. SatSure has many job openings right now.