Moon Monday #143: The Chandrayaan 3 hop, the crash site of Luna 25, a SLIM eager for blastoff, and more mission updates

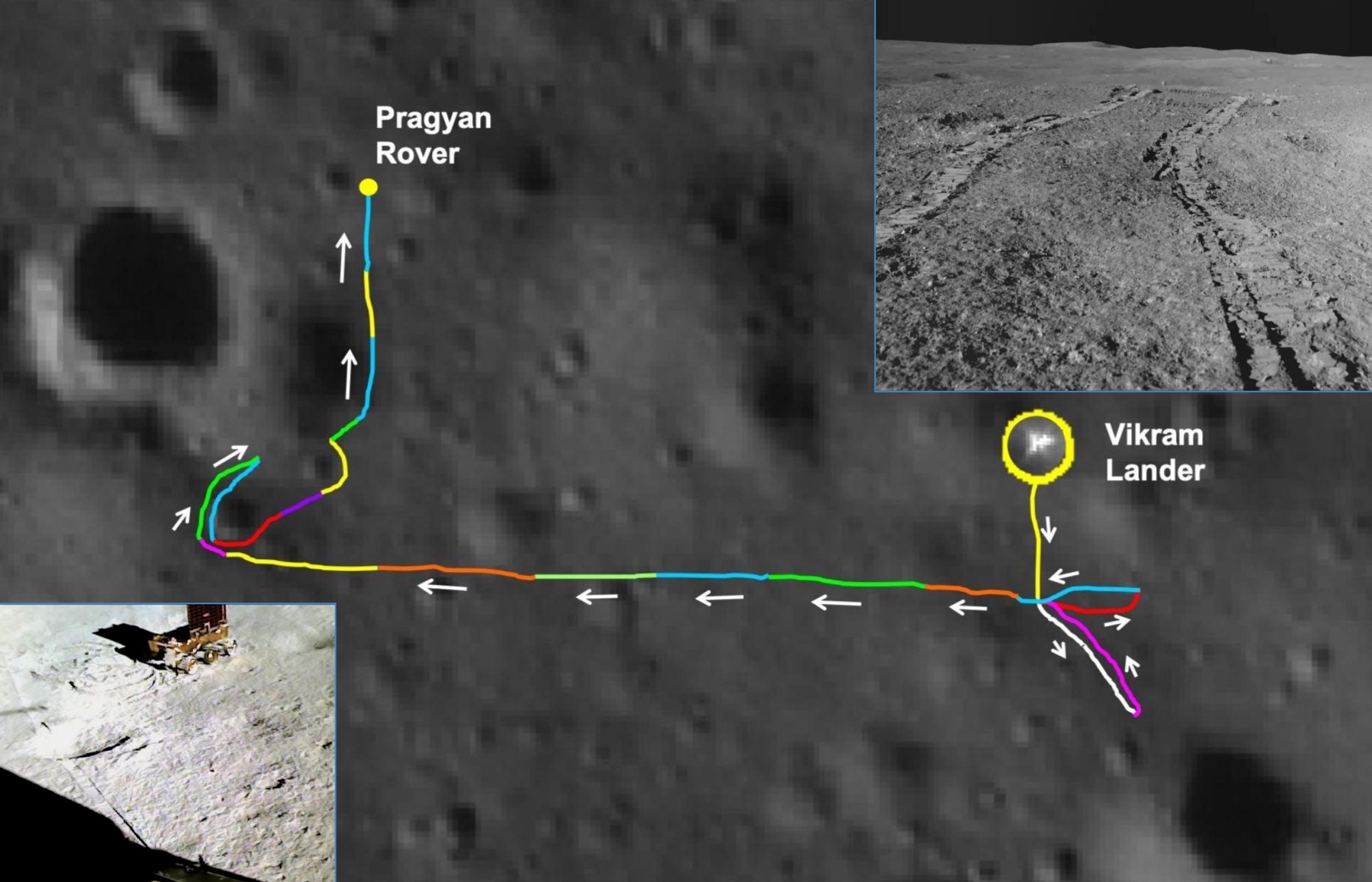
Today, September 4, ISRO set the Chandrayaan 3 Moon lander Vikram in sleep mode around 3:30 UTC. This was shortly after sending commands to turn off its three active instruments: the thermal probe, the seismometer, and the plasma experiment. Likewise, a fully charged Pragyan rover, which has traversed 100 meters on the lunar surface over 10 Earth days, was put to sleep mode on September 2. Its deployed solar panel is facing the direction of the next local sunrise on September 22.
ISRO has shared summaries of initial data from each of Chandrayaan 3’s experiments, with actual science results to only come later, of course. This marks a successful end to Chandrayaan 3’s nominal mission. If at all the lander and/or rover survive the frigid lunar night, which is expected to have peak cold temperatures around -200° Celsius, ISRO hopes to reestablish communications with them for an extended mission.
And then there was a hop
ISRO pulled a trick up its sleeve when it made the Vikram lander hop on September 2 around 21:21 UTC. The lander lifted about 40 centimeters up and safely landed 30–40 centimeters away, in the opposite direction to where the rover was previously deployed.
In my blog post last month on “Will Chandrayaan 3 hop after landing?” I wrote:
Three of the four lander instruments need to be deployed: the seismometer, the thermal probe, and the plasma experiment. Based on publicly available information, the lander has no mechanisms to safely reel back all these instruments and redeploy them.
Well, I couldn’t have been more glad to find out this isn’t true! Chandrayaan 3 has reeling and redeployment mechanisms for each of those instruments after all, something ISRO mentioned the first time only in the announcement of the hop. Of course, they folded back the rover ramp too before the hop. ISRO redeployed the instruments and the ramp post-hop, with the instruments confirmed to be collecting data again.
However, Chandrayaan 3’s hop isn’t without its risks, and would’ve involved some intriguing considerations and their tradeoffs:
- The rover, which lies only ~40 meters away from the lander, likely would’ve received some of the harsh lunar dust blasted away by the lander’s 800-newton engines. This might have affected the rover’s solar panels, wheels and mechanisms, and the optics, increasing the risk of reviving nominal operations the next lunar day. Hopefully not though; we’ll find out if the rover wakes up on or after September 22.
- The functioning of the lander instruments and other lander hardware could’ve been affected by dust blowback during the hop. The former is relevant if ISRO really hopes to operate the lander science suite for another lunar day.
- ISRO’s stated rationale for the hop is that it “enthuses future sample return and human missions”. While the demonstration might certainly contribute data towards planning sample return and eventual human missions, it doesn’t seem to be a necessary step since previous robotic sample return missions of Luna 20, Luna 24, and Chang’e 5 as well as the Apollo landers didn’t need need previously demonstrated hops to have worked fine.
- The hop means the thermal probe’s later measurements of the lunar soil are now affected by being far less pristine than even from the original August 23 landing, wherein at least Vikram had touched down vertically at a fast ~1 meters/second. The hop could’ve also jeopardized some experiments which give better results with time, such as the seismometer.
- Scientists studying rocket plume effects on lunar soil are going to love this hop though.
I doubt ISRO will make the process public but it would be fascinating to know which tradeoffs were made to take the decision to hop. It would seem that low confidence in the lander and rover surviving the frigid lunar night was the driving factor, as that would explain pros of a hop outweighing the risks to the potentially extensible mission science and operations.
Many thanks to Epsilon3 for sponsoring this week’s Moon Monday.
More mission updates
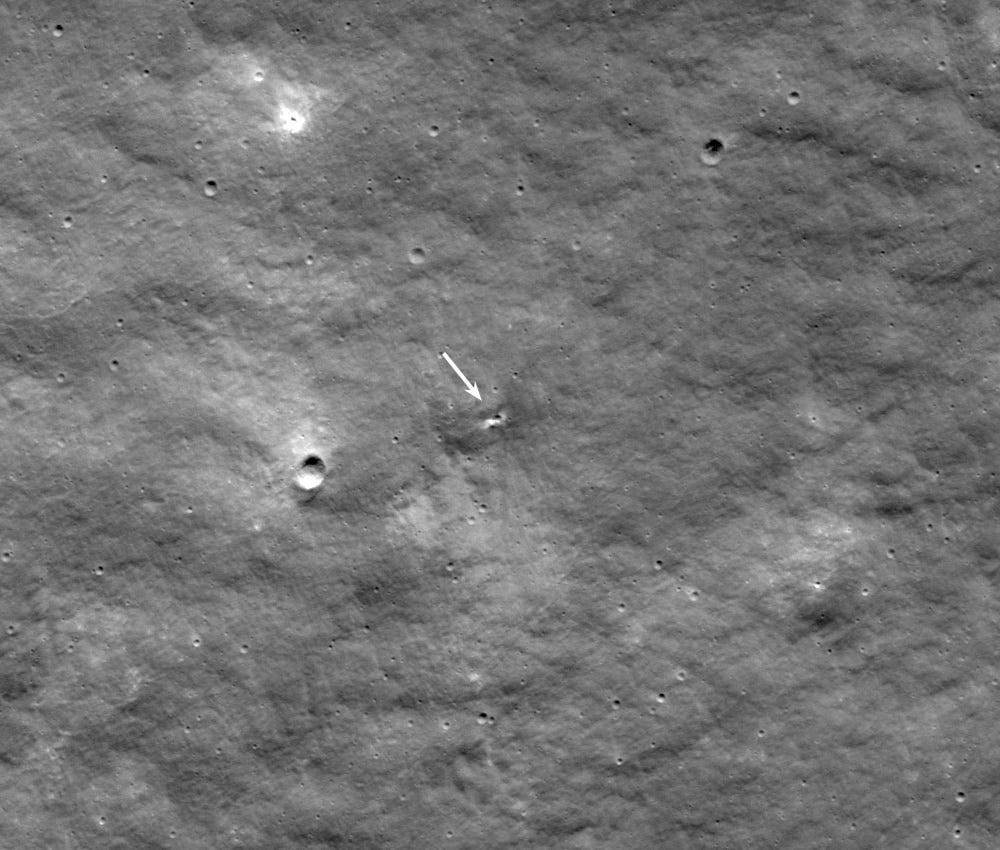
- NASA’s Lunar Reconnaissance Orbiter (LRO) imaged a new 10-meter wide lunar crater at 57.87°S, 61.36°E on August 22 which is likely the impact site of Russia’s Luna 25 spacecraft. This places it close to the coordinates of 57.9°S, 61.5°E predicted by Russian researchers simulating the spacecraft’s trajectory. Roscosmos is considering repeating Luna 25’s objective to land on the Moon with another try by 2026.
- After several recent delays due to bad weather, JAXA is targeting launch of its SLIM Moon lander on the Japanese H-2A rocket on September 6 at 23:42 UTC. The launch window runs through to September 15. The compact lander aims to demonstrate pinpoint lunar touchdown (~100-meter accuracy) with a low total mass of only 730 kilograms. To that end, SLIM will attempt to land within the rocky ejecta of the 300-meter wide Shioli crater.
- Intuitive Machines made available $20 million through its stock sales for “working capital needs”, Jeff Foust reports. The company recently announced that its first Moon lander IM-1 is complete, and that after completing several space-simulating tests the company will deliver the lander to SpaceX by September 15 for launch preparations. The companies are targeting a six-day launch window starting November 15. IM-1 will carry six NASA science & technology payloads to the polar Malapert A crater at 80°S as part of the agency’s CLPS program.
- Japan-based GITAI has raised $15 million—adding to their previous $46 million—to develop its lunar rover with a two-meter inchworm robotic arm, Jack Kuhr reports. GITAI recently expanded its US presence, and has been operating prototypes in the Mojave desert to test various activities related to assembling parts of lunar habitats ahead of a hopeful 2026 launch.
Even more Moon
- ESA continues expanding its “SciSpacE” program to fund more science on and around the Moon, with the latest focus being on experiments aboard the upcoming NASA-led Gateway international lunar orbital habitat launching mid-decade. Previously in June 2022 as part of SciSpacE, ESA asked researchers across its member (and affiliated) states to submit lunar science payload proposals that can be developed for launch within 3 years of an identified flight opportunity. Winning proposals from a down-selected pool this year could launch as soon as mid-decade, likely on a NASA-funded CLPS lander.
- During NASA’s Artemis I mission last year, the agency’s Deep Space Network antennas spent 871 hours tracking eight small satellites—almost the same as that on Orion—which took away time and resources from the agency’s key science missions like JWST and Mars orbiters, Stephen Clark reports. While NASA is building three new ground stations dedicated for future Artemis crewed lunar missions to reduce load on the Deep Space Network, these “Lunar Exploration Ground Sites” or LEGS won’t be operational until at least 2027 and even then won’t take away the Deep Space Network’s complete Artemis load.
- China is soliciting names from the public for its crewed lunar orbital and landing spacecraft for the country’s first human Moon landing mission by 2030.
- ESA is funding Austrian company Incus to refine a new 3D printing method that could one day reuse scrap metal from old lunar surface hardware to produce parts for aiding astronaut habitats. So far, some (simulated) lunar dust contamination isn’t proving to be an issue to the device’s working, which is good since lunar dust can be readily expected to be ingrained on hardware sitting on the Moon for years.
- The Planetary Society’s latest Planetary Report is a Moon special. 🌝