Smashing success: The time NASA figured out our Moon is cratered all the way down | Moon Monday #280
Plus: What the agency’s planning in the lead up to safe Apollo astronaut landings teaches us about preparing for the next frontier this century.

For NASA to safely land 12 astronauts on the Moon with the Apollo missions, a lot had to go right. But before it could even attempt Apollo, the agency needed to know what our Moon is like up close. Worrying about the basic nature of the lunar surface and soil may sound mundane now but it was a big unknown back then. For instance, you do not want to land astronauts on the Moon only to have the lander’s legs or even the low-hanging engine sink and potentially get stuck in soil. To ensure that astronauts could safely land on the Moon, NASA had to first map the terrain at various regions of interest at local scales, know the frequency of hazardous rocks and boulders within, and determine the physical nature of the lunar soil.
The trouble was that back then a key way to capture images of our Moon was via big telescopes on Earth, which couldn’t discern much at the required local scales. Launching spacecraft to image the lunar surface up close was the only way to ascertain the required information. Between 1966 to 1967, NASA sent five orbiters under the “Lunar Orbiter” program to make a global map of the Moon with a resolution of roughly 60 meters—10 times better than Earth-based observations. Compared to meter-scale resolutions of orbiters today, this may seem coarse but the more than 1600 photographs from Lunar Orbiters were one of a kind at the time. It allowed NASA to identify many locally smooth enough landing site candidates for the robotic Surveyor landing missions as well as Apollo, and help scientists in better understanding the Moon’s geology to inform Apollo science.

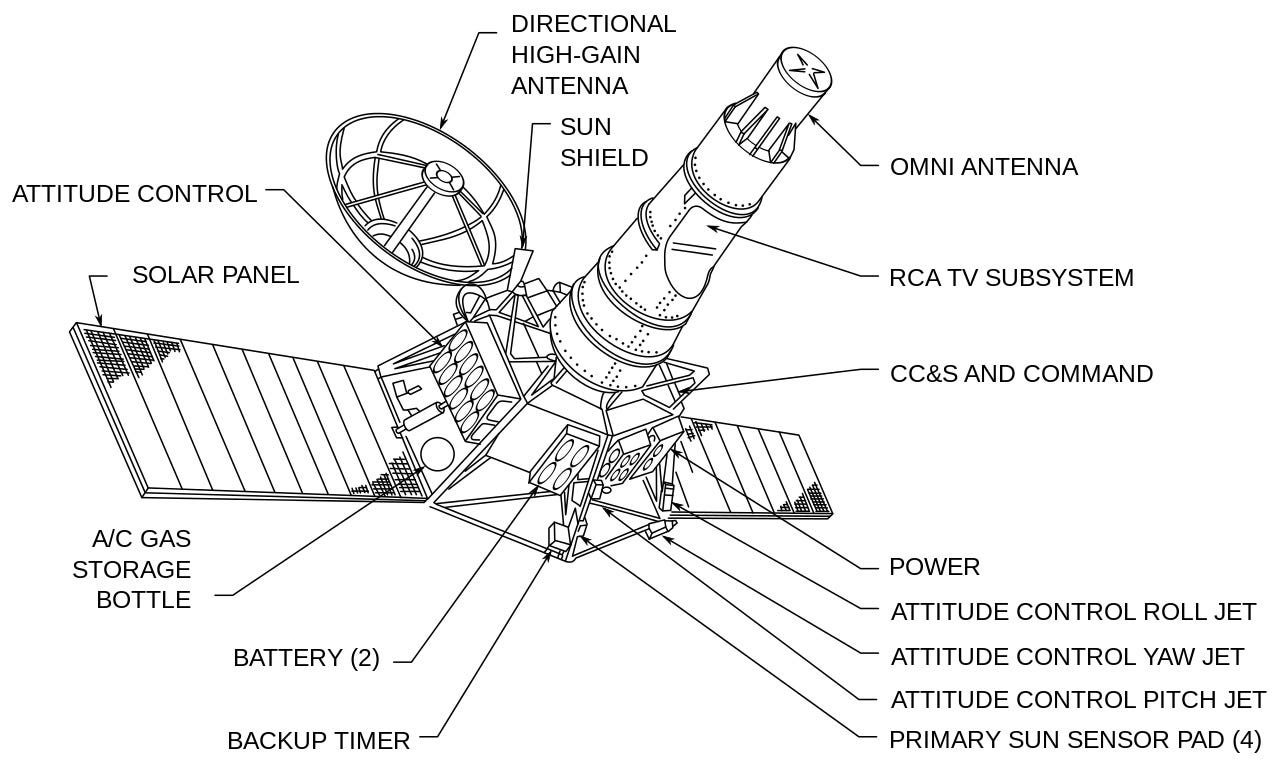
While Lunar Orbiter photographs provided decent local as well as wider views of lunar regions for context, they weren’t good enough for getting lander-scale imagery by themselves to ensure safe touchdowns for future astronauts. For those finer scales, NASA had also launched the Ranger series of spacecraft in the prior years. These would intentionally smash into the Moon.
{kind=link}
Each Ranger spacecraft was equipped with a TV camera to send images to Earth in near real time while descending towards the Moon. The resolution of images the Rangers ultimately captured before impact was at least 10 times better than possible from orbit at the time. When Ranger 7, the first successful mission of the Ranger Program, took the fall in 1964, its imagery surprised many. Many smooth plains on the Moon, which seemed welcoming at first glance, were full of craters when approached up close.
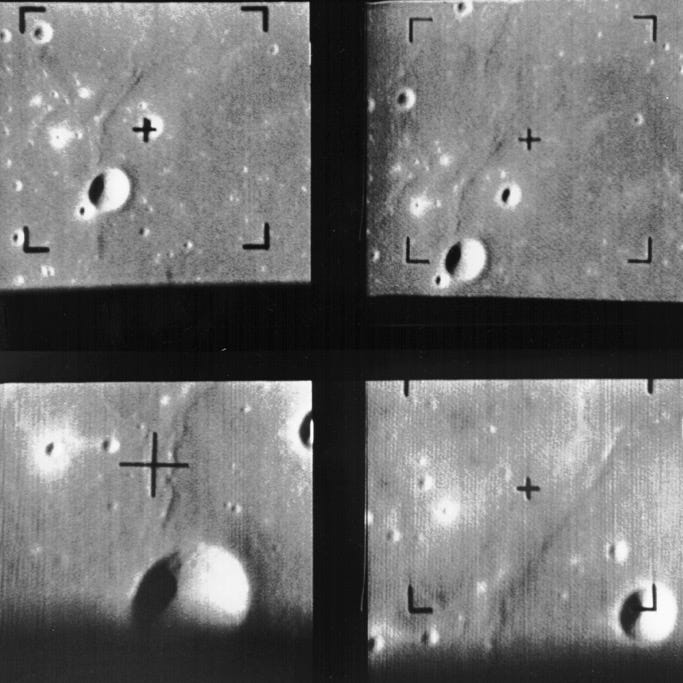
I made a video from Ranger 7’s camera shots, containing images captured from 2000 kilometers above the Moon’s surface down to just 500 meters, after which the spacecraft crashes.
The Ranger 8 and 9 missions all but confirmed the same trait, that the Moon is riddled with craters down to local landing scales, something to feed into Apollo’s pre-touchdown planning. The more than 15000 high-resolution photographs sent to Earth by the Ranger missions thus provided great complementary data to the Lunar Orbiters, helping NASA select safe landing regions for Apollo. The NASA Ranger missions were thus literally and figuratively a smashing success.
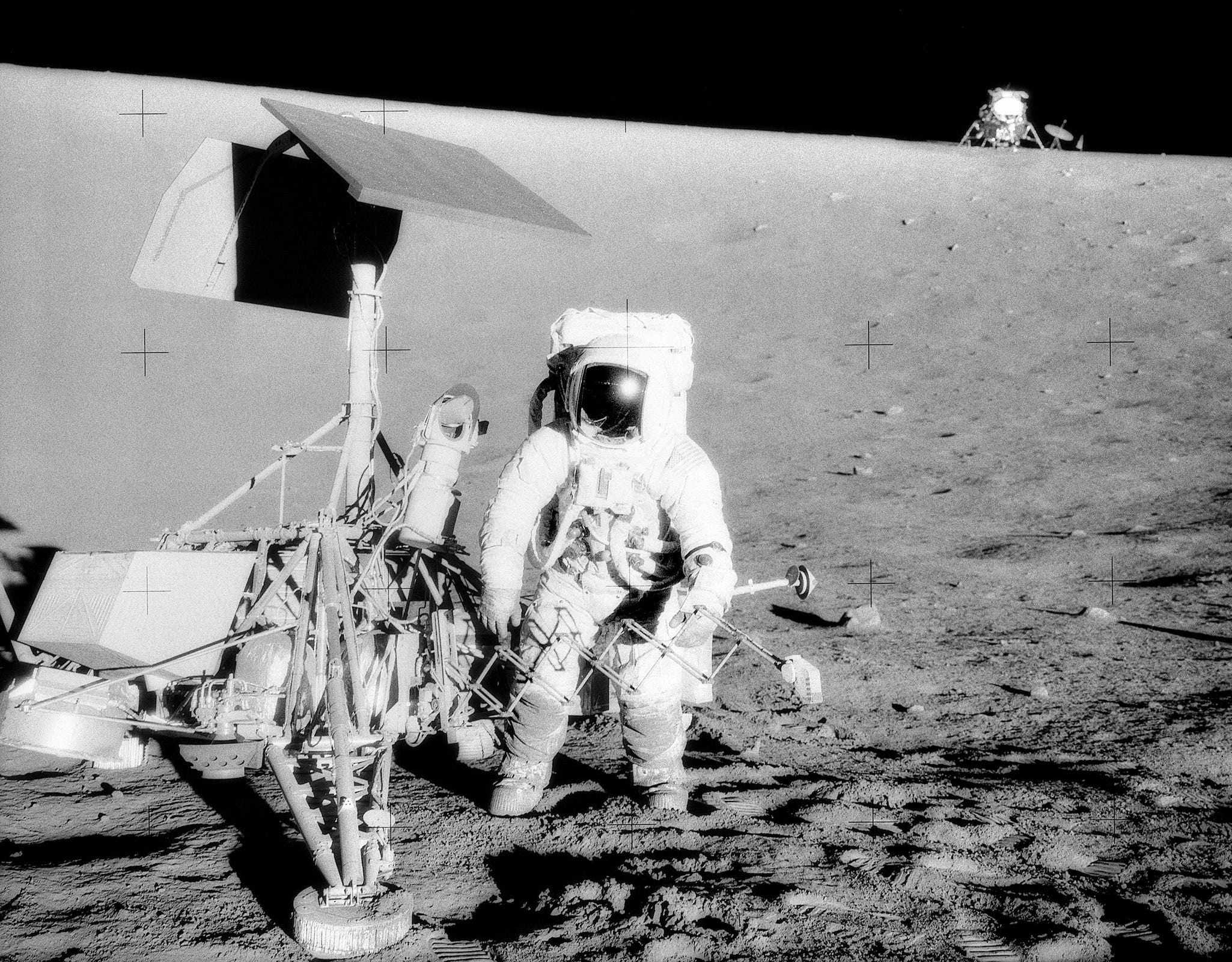
Then there was Surveyor, the last robotic spacecraft program to precede Apollo. Between 1966 to 1968, the program saw five successful soft landings, four of which were at near-equatorial landing sites, the type considered for Apollo. The fact that the Surveyors were upright, and didn’t sink, was a relief in itself but the landers helped in other ways too. The Surveyors obtained more than 80000 photographs of the Moon’s surface when on it, imaging at up to millimeter-level resolution. Surveyor images too showed numerous small craters scattered all over the surface. The landers also carried various instruments and a surface sampler, which helped determine the mechanical properties of the lunar soil. This was crucial in planning the large Apollo lander designs as well as the activities astronauts would conduct during the missions.
{kind=link}
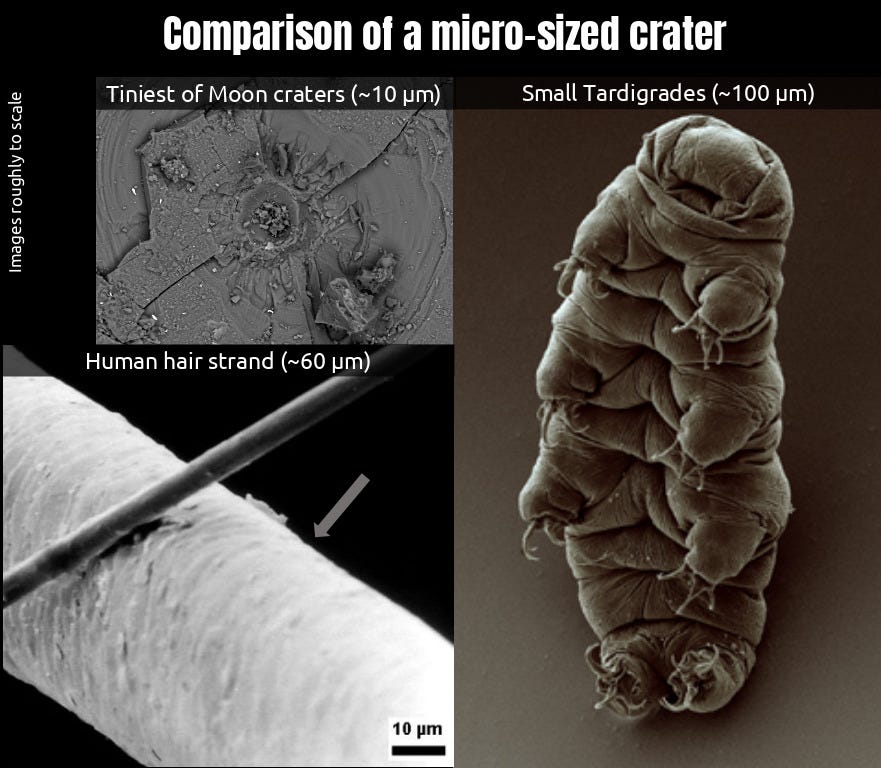
Aside: To the delight of a scientific mind, the trend of finding craters at smaller and smaller scales on the Moon didn’t end with the Surveyors. Closeup images of rock samples brought back by Apollo and the Soviet Luna missions revealed that our Moon is cratered even on microscopic scales. Our Moon really is cratered all the way down.
{kind=link}
Preparing for the next frontier
Systematic planning like the case of the Lunar Orbiter, Ranger, and Surveyor programs is what allowed NASA to execute safe landings for Apollo astronauts, each program filling major gaps in our understanding of the Moon’s surface. Planning the same kind of feat today is relatively easier now that we know more about our Moon, including avoiding succumbing to the effects of the Moon’s lumpy gravity either.
However, since the world’s new rush to the Moon catalyzed by the discovery of water ice is targeting not just short duration crewed Moon landings but sustained operations leading to full-fledged Moonbases, the next layer of technologies and fundamentals about the Moon to attain are at higher scales than Apollo. As just one aspect, we have no idea of the true nature of polar permanently shadowed regions which contain much of the water ice and other volatiles. How exactly will these cryogenic environments treat our hardware over time? Will instruments work as intended? How about our space grade electronics and Moonbase materials?
Here, China’s step-by-step approach spanning robotic sample return missions, precision water ice explorers, navigation and communications technologies, and so on has kept them on the right track. This is what makes upcoming missions like Chang’e 7 and Chang’e 8 so interesting to follow. NASA, unfortunately, has not been systematic enough this time around, with equivalent outcomes lacking or lagging. The efforts have been so scattered across disparate organizations and time that more than a decade on and the US has still failed to explore lunar water as a principal goal of the Artemis program, a goal necessary for sustained lunar exploration, while also struggling to develop crewed landers across both SpaceX and Blue Origin. The US bloc needs to take a step-by-step approach, not unlike Apollo did before or China does today, to also build a set of resilient exploration systems for the Moon’s treacherous poles that will also scale beyond. Nearly everything about these systems will be exotic even for a space mission, from their sheer mobility to their level of robustness and interoperability.
Maybe future generations building generalized technologies to explore and live across the Solar System, like shown in The Expanse, take these technologies as a given. But these have to start existing somewhere at some point. The fact that there are at least two distinct efforts in the world now to sustain crewed and robotic exploration of our Moon and space gives humanity a better chance. But the more nations that attempt the merrier, both technologically as well as socially, and so countries like India wishing to land humans on the Moon also need to up their game.
Many thanks to Astrolab and Gordon Roesler for sponsoring Moon Monday. If you too appreciate my efforts to bring you this curated community resource on global lunar exploration for free, and without ads, kindly support my independent writing, which is purely reader-funded. I don’t use AI to write a single word and cite everything.