Moon Monday #155: Prepping for PRIME-1 time, a Canadian capcom, a FLEXible rover, and more
This is a half-yearly appreciation note, and an introduction for readers subscribed after April, that my Moon Monday newsletter is being supported by sponsor Epsilon3—for the third year in a row! Led by Laura and Max, Epsilon3 is a web-based platform to manage, streamline, and reduce risk in complex spacecraft building, testing, and operational procedures. It’s used by Astrobotic, Firefly, Astrolab, and more organizations creating for the Moon and beyond. 🌙
If you too enjoy and appreciate my work to serve space communities worldwide, kindly consider sponsoring Moon Monday—my flagship writing—via your organization:
First mission to drill on the Moon’s south pole is prepping for prime time
While Intuitive Machines prepares to launch its first Moon lander on January 12, 2024, carrying six science & technology payloads for NASA’s CLPS program, progress on the company’s second CLPS lander is continuing too. Launching sometime in 2024 on a SpaceX Falcon 9 rocket, said lander aims to deliver the NASA-funded, Honeybee-Robotics-provided TRIDENT drill at an optimum location on the Moon’s south pole where underground water ice is expected based on orbital data. The lander will drill up to 1 meter below the surface, and analyze the excavated material for water ice and other such volatiles using the MSolo mass spectrometer—a first such study.
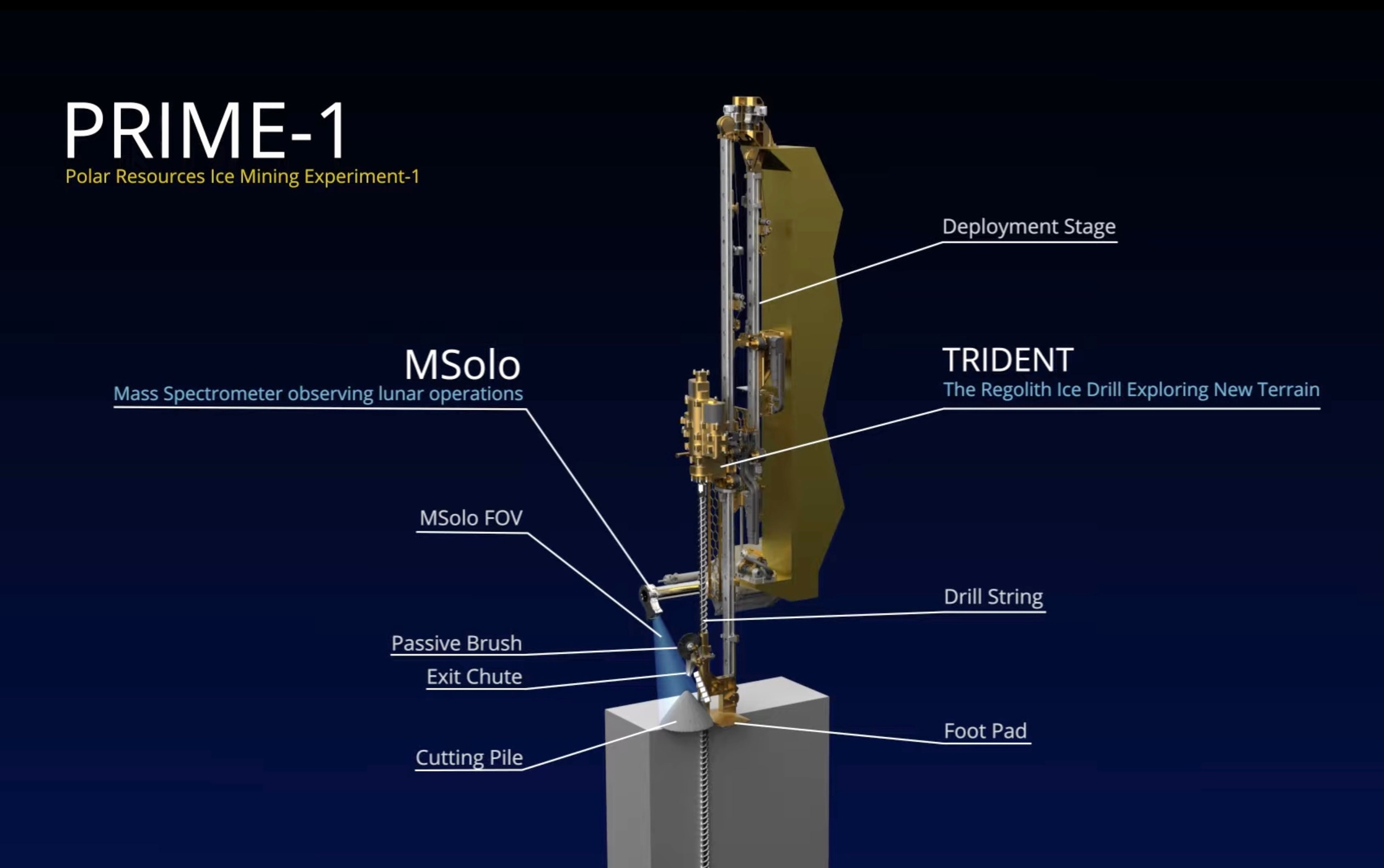
To that end, teams of engineers from across these mission elements have started testing hardware operations on Earth to simulate aspects of the mission. The aim is to ensure that the project’s key goals are achieved within the limited mission time period of ~10 Earth days. After all, it’s not just the science output from this mission but also the operational knowhow which will feed forward into NASA’s upcoming long-duration VIPER rover mission, which is launching mid-decade to study lunar polar water ice with a variant of the TRIDENT drill and the MSolo mass spectrometer.
Let’s circle back to Intuitive Machines’ second CLPS lander, which also has a rover and a hopper in store for us.
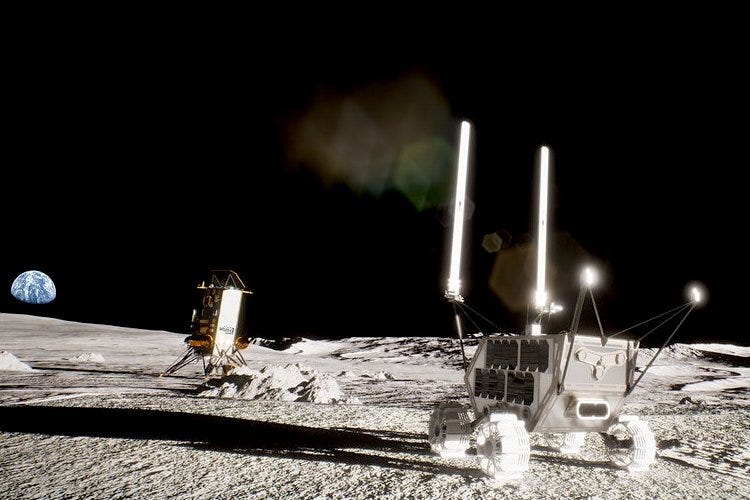
The lander will deploy Lunar Outpost’s MAPP rover on the Moon’s surface. It will sport a near-field depth camera to reconstruct the surface for future astronaut training in virtual reality, deploy a miniature swarm robot to take surface temperature measurements and also inspect the rover’s physical health, and host a silicon chip hosting reflections of people in native languages. Notably, MAPP will collect some lunar soil and transfer its ownership to NASA as part of the latter’s move to set precedence for future resource use under the US-led Artemis Accords. In another first, the MAPP rover will also host antennae from Nokia to test a 4G/LTE network on the Moon for NASA, for which Nokia got an experimental spectrum certification last year. The aim is to see how we might get high-throughput, long-range, and low-latency communications necessary for having a sustainable lunar presence in the future.
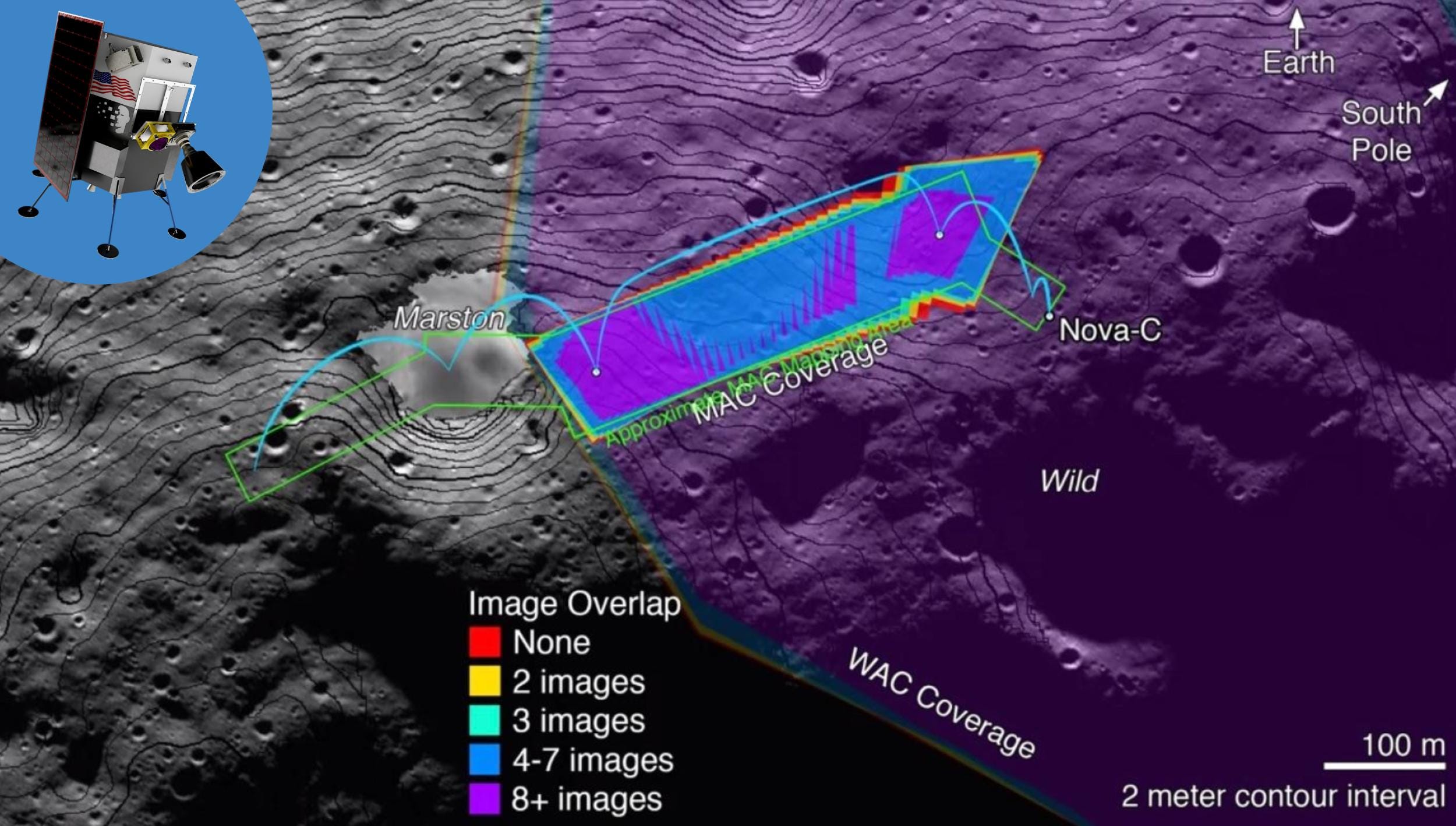
The Intuitive lander will also deploy the company’s own NASA-supported, $41 million hopper called Micro-Nova, which aims to hop five times to capture high-resolution imagery and other measurements of the surface under its flight path. One of the hops would be over a permanently shadowed region to detect and study potential water ice in there. Trent Martin from the company said at the European Lunar Symposium in June that the hopper—which sports two Canadensys high-resolution imagers—is now enhanced with a neutron spectrometer for subsurface hydrogen detection (as indirect signs of water ice), a radiometer for surface temperature measurements, and a Nokia 4G antenna.
Many thanks to Epsilon3, Louis-Jérôme Burtz and Arun Raghavan for sponsoring this week’s Moon Monday!
More mission updates
- CSA announced on November 22 that astronaut Jenni Gibbons will be Canada’s backup of Mission Specialist Jeremy Hansen for NASA’s Artemis II mission, wherein a total of four astronauts will fly around the Moon and back circa early 2025. Hansen is flying in return for CSA contributing the Canadarm3 robotic servicing system to the Gateway, which is an upcoming NASA-led international crewed lunar orbital station. Gibbons will also help with astronaut training for upcoming Artemis missions, including the crewed Artemis III landing. In fact, Gibbons will also be a lunar capcom, whose job is to be an efficient communications bridge between mission control and in-flight astronauts.
- Astrolab will have at least eight payloads worth $160 million aboard its first lunar rover targeting a 2026 launch, Jeff Foust reports. The large rover, called Flexible Logistics and Exploration (FLEX), will be deployed on the Moon’s south pole by a SpaceX Starship launch & landing system. A notable payload comes from Interstellar Lab, which will attempt to grow plants in pods on the surface—similar to China’s Chang’e 4 biological experiment. (Also see: Plants grow in lunar soil, but barely like it). The mission is intriguing because it has essentially the same rover design that Astrolab pitched to NASA earlier this year for the agency’s request to fund a versatile Lunar Terrain Vehicle, which will be used across Artemis missions starting Artemis V for at least 10 years. Astrolab has been testing FLEX’s fully-functional terrestrial prototype for mobility, crewed, and remote operations, including a variety of large payload deployments. Tangent: NASA is working with Astrolab to build and demonstrate a durable tire for future lunar rovers that can better tolerate the extremely cold temperatures of permanently shadowed regions on the Moon’s poles. This should allow much better mobility as well as flexibility in mission planning and operations.
More Moon
- On November 14, UAE’s University of Sharjah joined the upcoming China-led long-term scientific base on the Moon’s south pole called the International Lunar Research Station. This agreement comes shortly after many countries joined the project recently, including Pakistan, Thailand, and South Africa. Andrew Jones lists all ILRS partners.
- Andrew Parsonson reports that following a June 2022 agreement between the Italian Space Agency (ASI) and NASA to conduct a preliminary design study of a multipurpose surface habitation module for Artemis Basecamp, ASI has contracted Thales Alenia Space to continue its development.
- The Russian Academy of Sciences started a year-long analog astronaut mission on Earth to study isolation effects on humans who will live for extended periods on the Moon in the future.

Job listings
- The Extraterrestrial Materials Analysis Group (ExMAG) is seeking two members for its Lunar Subcommittee who have a keen interest in aiding NASA’s Artemis missions with work on sampling tools, handling of cold samples, resource characterization and extraction, and more. Tangent: NASA is working to store pristine samples astronauts will collect from some of the Moon’s permanently shadowed regions in cryogenic freezers starting with Artemis VI. Earlier Artemis surface missions will still collect such samples—they just won’t come to Earth as frigid as they’ve existed.
- The venerable Lunar Reconnaissance Orbiter team is looking for a Research Analyst Assistant to support the imager’s science operations with generating of data products, mapping, data analysis, and more.